Роботы Boston Dynamics станцевали под музыку

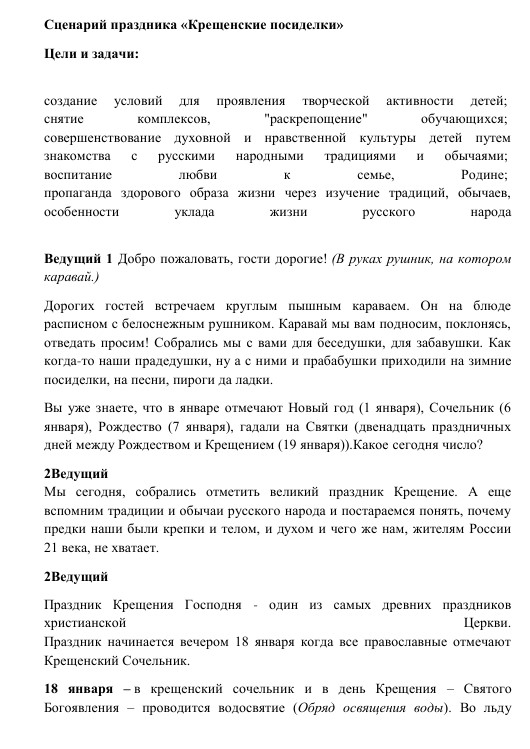
Компания Boston Dynamics опубликовала ролик, в котором все ее роботы — два человекоподобных Atlas, четвероногий Spot и колесный Handle — танцуют под песню Do You Love Me группы The Contours, демонстрируя свои возможности.
Ходячие роботы существуют уже несколько десятков лет, но в последнее десятилетие они получили наибольшее развитие и наконец стали переходить в мелкосерийное производство. При этом усовершенствование аппаратной части и алгоритмов ходячих роботов происходит очень быстро, и этот прогресс весьма заметен. Для примера, еще несколько лет назад, в 2015 году, многие роботы, участвовавшие в соревновании разработчиков человекоподобных роботов, проводимом DARPA, нередко испытывали трудности даже с поддержанием баланса на месте или при медленной ходьбе:
Boston Dynamics, которая считается одним из лидеров в области ходячих роботов и любит демонстрировать возможности свои разработок необычным образом, например, паркуром или бускировкой грузовика упряжкой робособак. Теперь компания выпустила новогодний ролик, в котором можно увидеть, на что способны роботы разных типов на текущий момент и как ловко они двигаются:
Ранее компания уже показывала танец одного Spot, а в новом ролике четверо роботов станцевали под песню Do You Love Me, записанную в 1962 году группой The Contours. Роботы поочередно присоединялись к танцу и синхронно выполняли движения в ритм музыки, причем разные для каждого типа. Многие их движений очень сложны для роботов, тем более такого размера и веса. К примеру, 80-килограммовые Atlas во время танца перепрыгивали с ноги на ногу так, что во время прыжка обе ноги находились в воздухе.
Вероятно, во время записи роботы выполняли заранее запрограммрованные движения, хотя уже существуют алгоритмы, позволяющие ходячим роботам подстраивать танец под конкретную композицию.
В середине декабря южнокорейская компания Huyndai купила Boston Dynamics у японской Softbank. В заявлении после сделки новые владельцы отметили. что будут развивать роботов для складов и представят серийного робота для этой задачи в 2021 году (вероятно, на базе Handle), а также будут разрабатывать медицинских человекоподобных роботов для работы с пациентами.
Роботы из Boston Dynamics станцевали под хит 60-х
Роботы от Boston Dynamics могут делать многие вещи: бегать, делать сальто, мыть посуду и открывать двери. Теперь они умеют и танцевать, что можно увидеть в ролике, опубликованном производителем на видео» target=»_blank»>сервер, » target=»_blank»>хостинге YouTube, сообщает портал The Verge.
На видео представлена вся линейка роботов Boston Dynamics — человекоподобный Atlas, робопес Spot и механическая рука Handle. Они представили совместный танец под хит 60-х «Do You Love Me» из кинофильма «Грязные танцы».
Это уже не первый раз, когда Boston Dynamics демонстрирует танцевальные навыки своих роботов. Так, в 2018 году компания опубликовала ролик, где робот Spot выполняет движение «Бегущий человек» под песню Uptown Funk.
Однако новое видео демонстрирует, насколько улучшилась координация машин: количество движений увеличилось, и роботы стали выполнять танец более согласованно, ритмично и плавно.
Это натолкнуло некоторых пользователей на мысли о том, что ролик постановочный и создан с помощью CGI-эффектов.
За роботов неожиданно вступился глава Tesla и SpaceX Илон Маск, который утверждает, что в ролике не используется компьютерная графика.
«Собственники не смогли найти правильную бизнес-модель для реализации своих разработок на рынке. После этого у компании было два пути — заморозить разработки до тех пор, пока кто-то не купит патенты или пока технологии не станут востребованы, либо продолжать разработки, чтобы дойти до этапа покупки компании какой-то из крупнейших технологических компаний. Компании повезло — их начали «покупать», — говорит сооснователь и директор по развитию «Промобот» Олег Кивокурцев.
По словам эксперта, в робототехнике технологиях Boston Dynamics есть перспектива. Hyundai сейчас может использовать разработки Boston Dynamics для создания подвески, систем амортизации, технологических линий производства, манипуляторов и других вещей, которые будут полезны для производства их основных продуктов.
Однако это не означает, что роботы Boston Dynamics будут пользоваться спросом на рынке в том виде, в котором они сейчас представлены.
Аналитик «Фридом Финанс» Валерий Емельянов считает, что основная проблема роботов Boston Dynamics заключается в том, что их сложно запустить в массовое производство.
«Сама платформа собирается в ручном режиме, делая каждого робота уникальным. Но что еще хуже, для каждого заказчика нужна отдельная программа. Сотни профессий, каждая из которых требует рабочий софт для удобного управления. И если его не будет, то покупателю придется еще нанять инженера, который настроит робота и будет корректировать его задачи», — рассказывает Емельянов.
Первоначально компания была основана в 1992 году как дочернее предприятие Массачусетского технологического института — в первую очередь, для фундаментальных исследований в области робототехники. Основные задачи компании концентрировались не на получении доступных и понятных продуктов, а на получении научных результатов — в том числе технологий, которые в дальнейшем можно модернизировать и использовать в других направлениях, считает Кивокурцев. Именно поэтому пока мы не наблюдаем широкого распространения роботов Boston Dynamics.
«Сейчас есть четкое понимание, что те задачи, которые эти роботы могут выполнять, можно делать намного дешевле. Но если помечтать, то сфер применения для таких роботов очень много: начиная от логистики, заканчивая безопасностью и охраной.
Просто пока это не рентабельно.
Мир к таким решениям уже готов, но не готова технология — она пока слишком дорогая», — поделился своими мыслями Кивокурцев.
Как Boston Dynamics научили своих роботов танцевать
Перевод интервью с вице-президентом по разработке Boston Dynamics
В конце декабря компания Boston Dynamics опубликовала на своем Youtube-канале танец роботов Atlas, Spot и Handle под песню «Do you love me». На текущий момент видео набрало более 26 миллионов просмотров.
Строго говоря, роботы в этом видео не делают ничего такого, чего они не делали бы ранее. Тем не менее, это все равно выдающееся достижение робототехники. Уникальной является художественная составляющая видео, которая разрабатывалась совместно с хореографом Моникой Томас. Мы видели, как Atlas выполняет простые задания, занимается гимнастикой и паркуром, но танцы – это что-то новое для него. Чтобы узнать больше о том, как это было сделано, мы взяли интервью и Аарона Сондерса, вице-президента по разработке Boston Dynamics (VP of Engineering).
Сондерс начал работать в Boston Dynamics в 2003 году, то есть он принимал участие в разработке большей части роботов Boston Dynamics, даже тех, про которых все уже забыли (например, Little Dog). Сондерс участвовал в проекте Atlas с самого начала, и последние несколько лет занимался исключительно им. Он согласился ответить на наши вопросы о танцующих роботах.
Что вы можете сказать о реакции интернета на ваше видео?
От каждого видео, которые мы публикуем, мы ожидаем чего-то своего. В этом случаеречь шла в первую очередь о веселье. Мы получили рекордное количество отзывов на Youtube, писем и звонков от людей, которые выражали энтузиазм и делились идеями о том, что нам стоит сделать дальше, какую песню использовать, и так далее.
Мое любимое сообщение прислала 94-летняя бабушка. Она посмотрела видео на Youtube и попросила своих родственников спросить у нас, кто обучил роботов этим крутым движениям. Это видео охватило более широкую аудиторию благодаря сочетанию старой музыки и современных технологий.

Раньше Atlas не двигался таким образом. Можете рассказать немного о том, как это получилось?
Мы начали работать с танцорами и хореографом, чтобы создать набросок танца. Самым сложным было провести коррекцию движений танцоров-людей с тем, чтобы их могли повторить танцоры-роботы. Мы использовали симулятор и вместе с хореографом перебирали возможные движения, которые будут под силу Атласу и другим роботам. Это был итеративный процесс: танцоры показывали нам движения, инженеры переносили их в симуляции и говорили, насколько легко робот сможет их повторить. Мы постоянно обсуждали, пробовали симулировать разные вещи и делали мелкие поправки, чтобы получить набор движений, совместимых с роботами.
С развитием проекта длительность итераций становилась все меньше и меньше благодаря созданию специализированных инструментов под эту задачу. В конце концов, используя эти инструменты, мы создали полную хореографию для одного из роботов всего за один день перед началом съемок. Не совсем корректно называть движения роботов «вручную заскриптованными», каждое движение было создано танцором и перенесено на робота с помощью созданных инженерами инструментов.
Какие движения было тяжелее всего перенести с людей на робота? Были ли движения, с которыми Атлас справился лучше, чем танцор-человек?
Обороты вокруг своей оси и балетные движения были самыми сложными, потому что они больше всего отличались от бега и прыжков, с которыми у нас уже был опыт работы. Они стали испытанием как для роботов, так и для программного обеспечения. В начале мы недооценивали силу и гибкость танцоров, роботу очень сложно повторить движения элитных атлетов. Я думаю, что Атлас не обладает диапазоном движений и силы людей-атлетов. Но мы продолжаем разрабатывать наших роботов в этом направлении. Для того, чтобы использовать гуманоидных роботов на производстве и в домашних условиях, мы должны достичь такого уровня производительности.
Роботы лучше людей в одном: они могут повторять одно и то же действие много раз подряд с высокой точностью повторения. Поэтому после начального программирования роботы могли повторять танец снова и снова, а мы тем временем экспериментировали с объективами камер.
Я понимаю, как вы использовали людей для постановки танца Атласов, но что вы делали с роботами Spot и Handle?
Люди, с которыми мы работали, очень талантливы во всем, что касается самовыражения через движение. Наши роботы очень динамично движутся и хорошо балансируют. Танцоры отлично понимали, как движутся роботы, вне зависимости от того, сколько у них ног – две или четыре. Если у вас нет готового шаблона движения животного или поведения человека, вам нужно думать более тщательно над реализацией, это справедливо и для коммерческих решений.
Каким образом ваш опыт в обучении роботов танцам, гимнастике и паркуру влияет на ваш подход к коммерческой робототехнике?
Мы считаем, что навыки, лежащие в основе танца и гимнастики, такие как ловкость, баланс и восприятие, являются фундаментальными для широкого ряда задач робототехники. Рецепт робототехники от Boston Dynamics – смесь создания роботов с новыми возможностями и веселья. Например, обучая роботов новым динамичным движениям за короткий срок, всего за несколько дней, позволяют нам лучше изучить возможности нашего железа.
Благодаря тому, что мы запустили продажи Спота, он практически перестал нуждаться в поддержке. Теперь он может танцевать сутки напролет. И мы добились этого именно благодаря тому, что раньше казалось абсурдным и веселым. Для того, чтобы научиться новым вещам, нужно зайти на неизведанную территорию.
Просматривая видео на Ютубе, невозможно сказать, как много времени вам потребовалось, чтобы все заработало как надо, и соответствует ли показанное в видео полным возможностям роботов. Что вы можете сказать об этом?
Я отвечу в контексте видео «Do you love me», но это справедливо и для других видео, которые мы снимаем. Мы тяжело трудимся над каждым нашим творением. Большая часть контроллеров Атласа были разработаны в предыдущих проектах. Работая над паркуром для Атласа, мы создали контроллеры с предсказанием модели, которые брали во внимание динамику и баланс. Эти контроллеры использовались, чтобы выполнять движения танца, разработанные совместно с хореографом и танцорами. Мы потратили месяцы на постановку танца и итерации в симуляторе.
Для танца требовалась сила и скорость, нам даже пришлось обновить часть железа Атласа, чтобы усилить его. На текущий момент этот танец требовал больше всего усилий от наших роботов. Может показаться, что паркур требует больших усилий, но это не так. Нам также потребовалось много времени, чтобы сопоставить возможности машины с возможностями алгоритмов.
После того, как мы разработали финальную версию последовательности движений, мы потратили всего два дня на съемки. Мы потратили большую часть этого времени, чтобы проработать траекторию движения оператора с камерой между движущимися роботами так, чтобы все движения попали на видео. Мы сняли первые две минуты видео без склеек.
Железо несколько раз подводило нас, иногда роботы спотыкались и падали. То, что делают наши роботы, не является надежным на 100%, но мы стараемся не обманывать наших будущих клиентов и показывать действия, которые могут быть повторены с большой степенью надежности. Нужно проявлять честность, если заявляешь, что добился чего-то, это требование является важным для нас.
Вы упомянули, что Спот может танцевать целый день. А что насчет Атласа? Если включить его в розетку, он сможет танцевать целый день?
Атлас не такой надежный механизм, как Спот. Существует всего несколько Атласов, они сложно устроены, и надежность не является главным требованием на этом этапе. Время от времени наши Атласы ломаются. Но в контексте танца, который мы пытались исполнить, надежность железа была на высоком уровне. А без надежности мы вовсе не смогли бы снять подобное видео. В этом плане Атлас похож на вертолет: помимо выполнения основной функции, много времени требуется на техническую поддержку. Спот же в этом плане больше похож на автомобиль – вы можете использовать его довольно долго, прежде чем ему потребуется техническое обслуживание.
Когда вы обучаете Атласа новым трюкам, это похоже на обычное машинное обучение?
В нашей компании мы использовали много разных подходов, но Атлас в данный момент не использует обучающийся контроллер. Возможно, однажды этот день настанет. Во время танца Атлас использовал комбинацию следующих подходов: реакция на приложенные силы, онлайн и оффлайн оптимизация траектории, и контроллер с предсказанием модели. Мы используем эти подходы, потому что они надежные, позволяют добиться высокой производительности, и мы хорошо понимаем, как с ними работать. Мы все еще не раскрыли полный потенциал этих методов.
Мы планируем использовать алгоритмы машинного обучения для улучшения софта и железа наших роботов, но нам, как и всему остальному сообществу робототехников, еще предстоит найти оптимальный способ использования этих методик. Думаю, это будет естественной частью нашего прогресса.
Большая часть динамических движений Атласа в данный момент происходит из нижней части его тела. Паркур также использует силу и ловкость верхней части тела. Недавно мы видели картинки, на которых Атлас подтягивается. Расскажите нам об этом.
Люди и животные делают невероятные вещи с помощью своих ног, и еще более невероятные вещи, когда используют все тело целиком. Мне кажется, паркур – это идеальная задача, чтобы раскрыть полный потенциал мобильности тела робота. Ходьба и бег были только началом этого пути. Последние несколько лет мы работали над такими динамическими движениями, как прыжки и повороты. Следующий шаг – исследовать, как можно увеличить ловкость робота за счет использования рук.
Одна из задач, которые стоят перед командой разработчиков Атласа, это использование рук в той же степени, в которой мы используем ноги. Я с большим энтузиазмом ожидаю результатов, которые мы получим в ближайшие несколько лет. Это позволит нам делать еще больше интересных вещей с нашими роботами.
Поделитесь своим мнением об использовании гидравлических и электрических моторов в динамичных роботах.
За время моей карьеры в Boston Dynamics я часто предпочитал ту или иную технологию. Сейчас я пришел к пониманию того, что каждая технология должна использоваться по назначению. Выбор актуаторов зависит от размера робота, от задач, которые будут стоять перед роботом, и от множества других факторов. В идеале, у вас под рукой должны быть актуаторы обоих типов. Мы использовали оба типа в различных роботах с большим успехом.
Мне кажется, основное различие между электрическими и гидравлическими актуаторами заключается в масштабе. Очень сложно создать миниатюрный гидравлический актуатор, то же самое касается гигантских электрических моторов. Фактор масштаба является решающим в некоторых случаях при выборе между этими двумя технологиями.
Кроме ваших проектов в Boston Dynamics, какие еще роботехнические проекты вызывают в вас энтузиазм?
Для нашей компании, огромную важность играет прогресс в области сенсоров, компьютерного зрения, восприятия местности. Чем сильнее развиваются эти области, тем больше мы можем сделать. Лично я слежу за развитием в области манипуляторов, особенно в том, что касается сложных динамичных манипуляций с использованием трения, манипуляций с гибкими податливыми предметами, веревками и так далее.
На наших глазах происходит переход от простых манипуляций в формате «поднять – переместить – отпустить», к более осмысленному взаимодействию с окружающей средой. Эти исследования позволят раскрыть потенциал мобильных манипуляторов, и, как мне кажется, позволят роботам полноценно взаимодействовать с окружающим миром.
Что еще вы хотите сказать зрителям этого видео?
Лично я хотел бы, чтобы больше людей проводили больше времени с роботами, чтобы они лучше понимали возможности и ограничения современной робототехники. Мы получаем много мнений и идей от людей, которые смотрят наши видео. И мне кажется, если они проводили больше времени с роботами, у них повысился бы уровень понимания и они придумывали бы больше применений для роботов в повседневной жизни. Я считаю, что робототехника имеет огромный потенциал, и я хотел бы, чтобы как можно больше людей шли по этому пути.
Мы получили рекордное количество отзывов на Youtube, писем и звонков от людей, которые выражали энтузиазм и делились идеями о том, что нам стоит сделать дальше, какую песню использовать, и так далее.
Недолго вам осталось, человеки!
Все так круто у них, но нафиг не нужно никому, почему-то.

Роботы уже не те


Boston Dynamic

Любовь, роботы, игра в кальмара

Немного магии

Как бегает и прыгает робот Boston Dynamics Atlas
Свободный перевод интервью с Пэтом Мэрионом, ведущим разработчиком программного обеспечения для сенсорных систем Атласа.
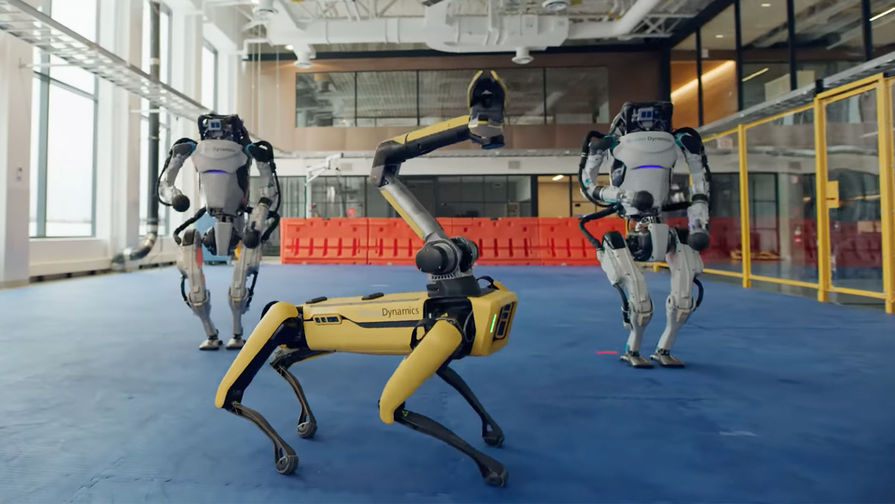
Разработчики Атласа используют паркур для быстрого создания поведения, динамического движения, и связи между восприятием и системами управления, что позволяет роботу в буквальном смысле адаптироваться на лету.
Алгоритмы восприятия робота преобразуют данные сесноров в формат, пригодный для принятия решений и планирования физических действий. Атлас использует инерционные сенсоры, сенсоры положения моторов, сенсоры силы для управления движением и удержания равновесия тела.
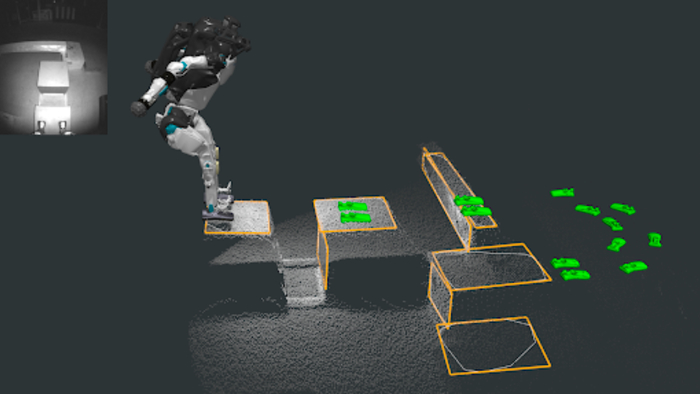
Слева вверху на рисунке показано, что видит инфракрасная камера робота. Оранжевыми прямоугольниками обозначены поверхности, которые Атлас смог распознать. Эти поверхности используются для планирования будущих действий, и зеленым цветом показано, куда робот планирует ставить ступни ног.
Робот получает высокоуровневую карту, показывающую, куда он должен двигаться и какие трюки он должен исполнить по пути. Эта карта является приблизительной, она не соответствует в точности построенной дорожке с препятствиями. Атлас использует эту карту для бега, при этом заполняя пробелы данными сенсоров. например, Атлас знает, что должен запрыгнуть на коробку. Если подвинуть коробку на полметра в сторону, Атлас все равно найдет и запрыгнет на нее. Если отодвинуть коробку слишком далеко, система не сможет ее найти и робот остановится.
Каждое движение, которое производит Атлас, получено из библиотеки шаблонов, подготовленных заранее с помощью оптимизации траекторий. Благодаря этому мы можем обучать робота новым движениям, добавляя новые траектории в библиотеку. Получая от системы восприятия запланированную цель для движения, робот выбирает из библиотеки шаблон, наиболее близкий к требуемому движению.
Разработка элементов поведения позволяет инженерам Boston Dynamics испытать пределы возможностей робота в симуляции, а также уменьшает количество вычислений, которые должен выполнять робот во время движения.
Для непосредственного выполнения движений робот использует так называемое управление с прогнозирующими моделями (model predictive control, MPC), т.е. модель динамики робота используется для предсказания того, как движения робота будут развиваться со временем. Контроллер постоянно решает задачу оптимизации для нахождения оптимального движения.
Шаблоны, сохраненные в библиотеке, являются примерами «хороших» решений. Контроллер адаптирует силы, положения частей тела, время исполнения движений, чтобы учесть факторы окружения: разницу в геометрии, проскальзывания конечностей и другие факторы, возникающие во время движения. Прыжок с платформы высотой 52 см принципиально не отличается от прыжка с платформы высотой 40 см, и MPC контроллер робота успешно решает подобные задачи.
Поскольку контроллер прогнозирует будущее, он может создавать плавные переходы от одного движения к другому. Это также облегчает создание библиотеки движений, поскольку инженерам не приходится рассматривать комбинации различных движений, которые могут следовать друг за другом. Разумеется, MPC контроллер не всесилен, и нам приходится искать компромис между сложностью контроллера и размером библиотеки шаблонов траекторий.
Работа над паркуром позволила получить глубокое понимание того, как можно создавать и управлять широким спектром динамических движений Атласа. Что еще более важно, это позволило создать расширяемую программную систему, которая будет расти и развиваться, давая Атласу новые возможности для восприятия и взаимодействия с его окружением.


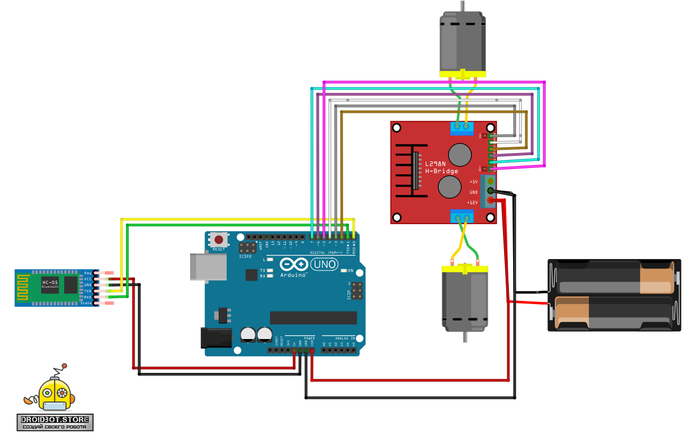
Гусеничное шасси-робот на базе Arduino
Проект был подготовлен студией droidbot.store
В комплекте к ним идут уже напечатанные втулки, но скажу сразу они не того размера, они просто не налезают на вал двигателя, такие уж китайцы)

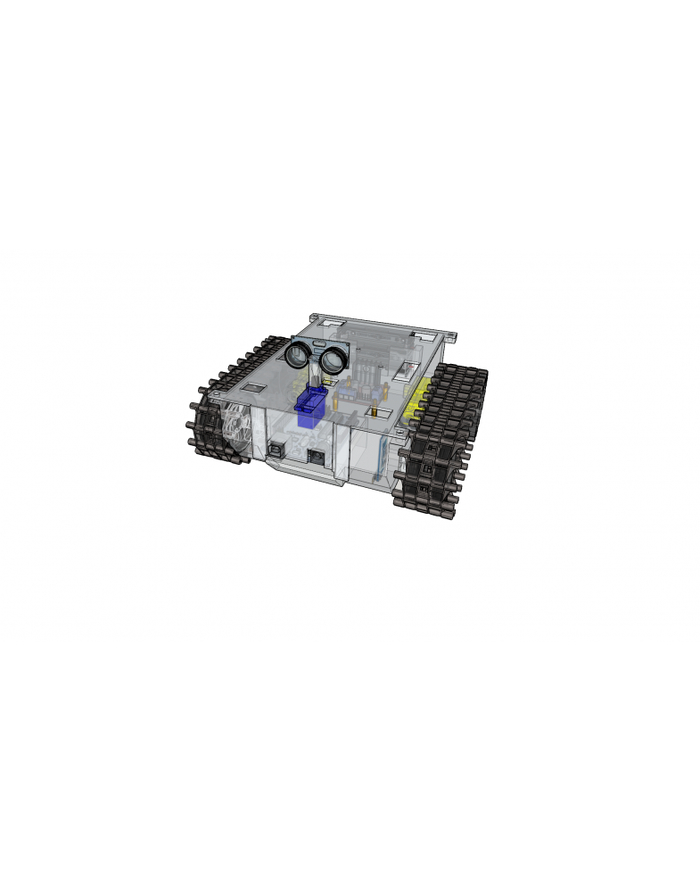
Корпус проектировал в SketchUp, получился немного угловатый, но мне все равно нравится, ибо все идеально выверенно, до 10-ых миллиметра (спасибо штангенциркулю) и напечаталось все очень круто. Пластик использовал PLA.
Как итог, готовая модель у меня выглядит вот так:
А это все комплектующие для сборки:
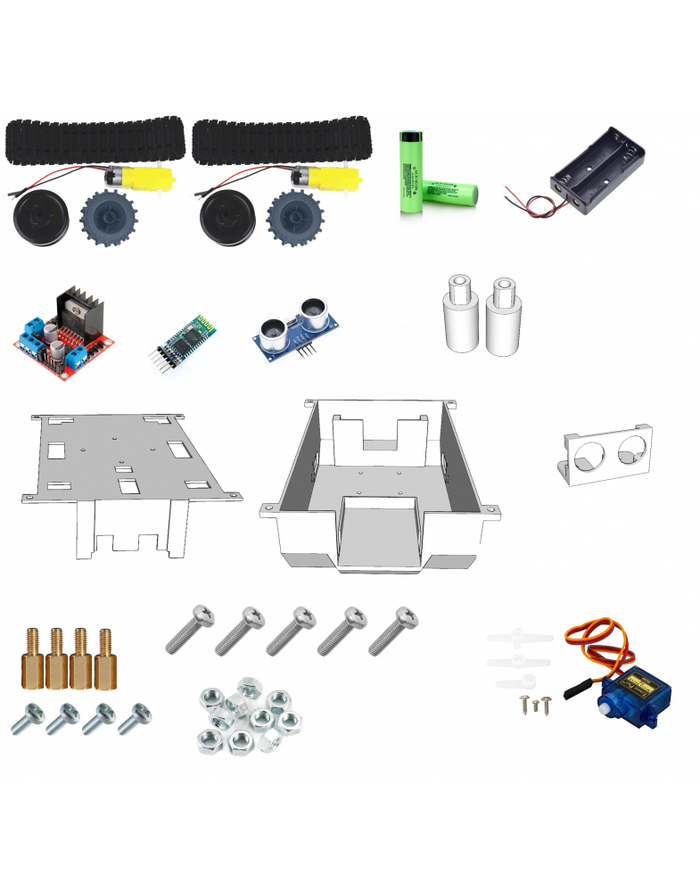
На видео не показано подключение серво и HC-SR04, так как в моем скетче они не используются, но место на крышке я под них все равно предусмотрел.
Инструкция по сборке:
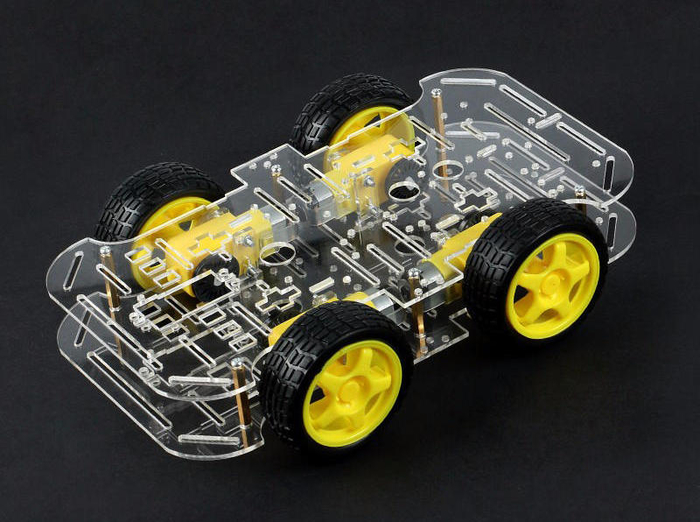
Проект «Bluetooth машинка 2WD на Arduino UNO»
А это один из возможных проектов на данном шасси. Ничего особенного в нем нет, но можно на скорую руку проверить шасси в действии.
Требуемые компоненты для проекта
Драйвер двигателей L298N
Две батарейки 18650
Во время записи скетча не забудьте отключить HC-05, а то выдаст ошибку!
https://wiki.droidbot.store/doku.php?id=машинка_на_arduino
Программа для управление с андроида:
И кого заинтересовал, вот сам набор, доступен под заказ в моем магазине:
Если будут заинтересованные статьей, то в общий доступ на thingiverse добавлю модель.

Сколько км человек сможет бежать со скоростью 8,1 км/час?
Маск изобретает роботов, с ограниченной макс скоростью 8 км/ч. Чтобы человек смог убежать. Вопрос, на ск км хватит аккумулятора?
Новые роботы Boston dynamics такие же неуклюжие, как я

Роботы Boston Dynamics продолжают осваивать паркур

Двуногий робот Кэсси преодолел 5 км за 53 минуты на одном заряде
Исследователи из Университета штата Орегон создали двуногого робота по имени Кэсси (Cassie), который первым преодолел расстояние в 5 км за 53 минуты без подзарядки аккумуляторов.
Робот был разработан под руководством профессора робототехники Джонатана Хёрста (Jonathan Hurst) при 16-месячном гранте в 1 миллион долларов от Агентства перспективных исследовательских проектов Министерства обороны США.
С тех пор, как Кэсси была представлена в 2017 году, студенты изучали различные варианты машинного обучения для робота. Кэсси использует машинное обучение для управления своей походкой. Бег является непростой задачей для роботов, потому что требует способности сохранять равновесие при смене положения во время движения. Кэсси научилась оставаться в вертикальном положении во время движения. Робот использует глубокое обучение с подкреплением (deep reinforcement learning). Этот метод используется для обучения роботов бегу, прыжкам и перемещению по лестнице (это Кэсси тоже умеет).

Школьники из России успешно выступили на международном турнире по робототехнике
Юные дарования: российские школьники выиграли два золота и бронзу на международных детских соревнованиях по робототехнике — а еще двое россиян попали в топ-10 турнира🤖

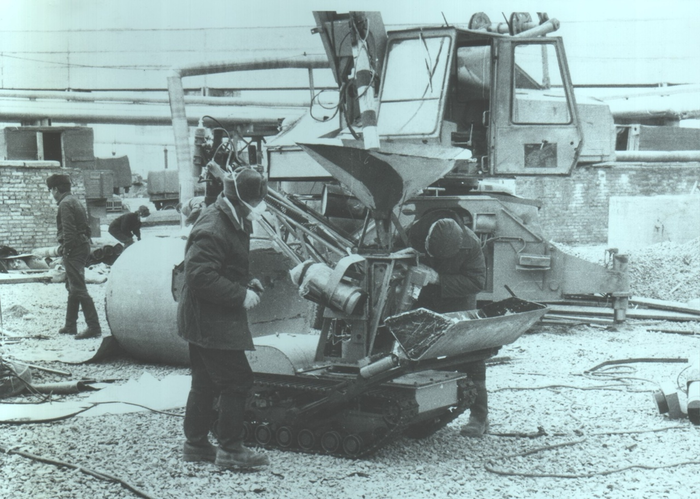
Первый робот-ликвидатор в Чернобыле
Рассказывая про многочисленных роботов, задействованных на ликвидации катастрофы на ЧАЭС здесь Роботы-ликвидаторы в Чернобыле, Роботы-ликвидаторы в Чернобыле 2, Роботы-ликвидаторы в Чернобыле 3, совсем забыл рассказать про самого первого.
С первых дней работы на разрушенном блоке постоянно ощущалась острая необходимость в дистанционных средствах разведки и диагностики. Решение применить роботизированную телеуправляемую технику было принято немедленно. Исследователи, работающие на «Укрытии», пытались создать такие средства из подручных механизмов и материалов.
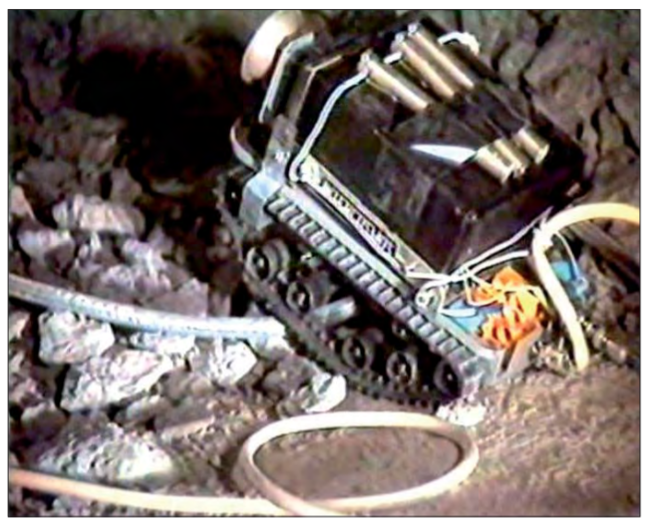
Одним из самых известных примеров самодельных «роботов» стало использование детской игрушки – самоходного танка, купленного в магазине «Детский мир».
Вот как это описывает один из участников работы:
— Танк был пластмассовый, величиной с небольшой телефонный аппарат, имел гусеницы и длинный кабель, идущий к пульту управления. По этому кабелю шло питание от батарейки на пульте к электромоторчику на танке и сигналы управления.
Танк мог ехать вперед и назад, разворачиваться и тарахтеть, имитируя стрельбу. Последнее свойство на блоке не пригодилось, а остальные были использованы в полной мере.
Танк переоборудовали: заменили кабель на более длинный (около
15 м) и многожильный, поставили на верх дозиметр, ТВ-камеру, измеритель температуры и закрепили сильный фонарь.
Теперь танк не только двигался, но и проводил примитивную дозиметрическую и тепловую разведку и вообще представлял собой своеобразную «охотничью собаку», которая могла бежать на поводке перед разведчиками при обследованиях блока и предупреждать об опасности.
Несмотря на свои весьма ограниченные возможности, он с честью выполнял работу и относительно легко отмывался от радиоактивности. Танк «дожил» до весны 1987 г., после чего уже не подлежал дезактивации и был захоронен на блоке».

Новые танцы от Boston Dynamics
Ролик вышел только что.

Забавная хренота
Роботы-ликвидаторы в Чернобыле 3
Для работ на ЧАЭС были направлены сотни единиц дорожных и строительных машин (бульдозеры, бетоновозы, скреперы, грейдеры, автокраны и т.д.), а также специальной техники инженерных войск. Многие из них были роботизированы и имели дистанционное управление.

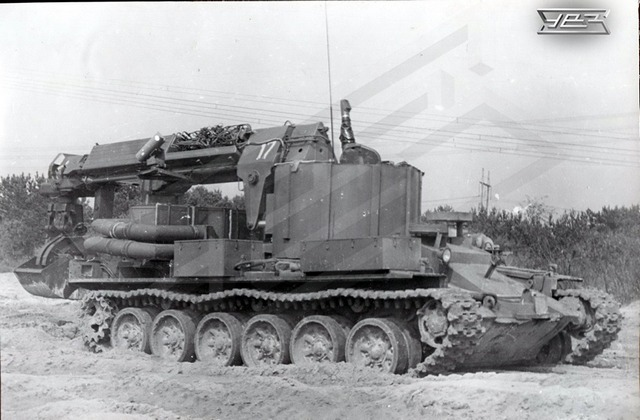
НИКИМТ ИМР-2Д «Динозавр»
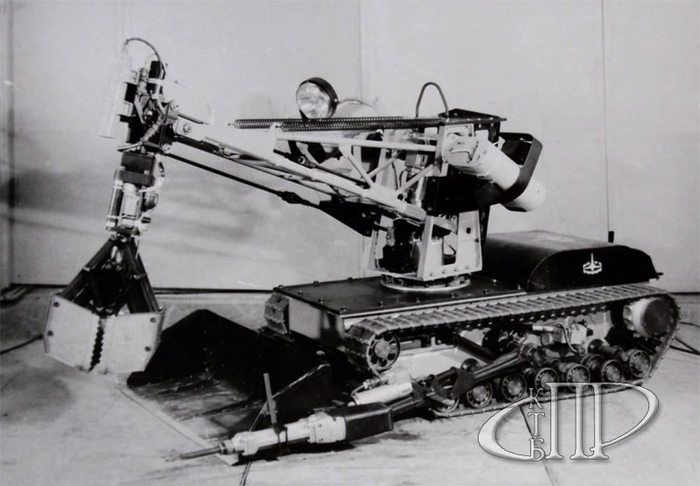
Определяющую роль для разбора радиоактивных завалов вокруг 4-го блока сыграли инженерные машины разграждения (чаще всего – ИМР и ИМР-2). В Чернобыле их называли «Динозаврами» из-за внешнего сходства. Они были оснащены бульдозерным и крановым оборудованием и имели телескопическую стрелу с захватом-манипулятором. Они использовались для разгребания завалов, снесения построек, покрытия территории слоем песка, гравия и др.
О роботизированном комплексе «Клин-1» ВНИИТрансмаш на базе ИМР рассказывал тут: Роботы-ликвидаторы в Чернобыле

Разбросанные взрывом радиоактивные обломки сгребались и загружались ими в металлические контейнеры, затем контейнеры захватом-манипулятором устанавливали на бронетранспортеры.
Почти сразу же выяснилось, что для работы в специфических условиях локальной зоны 4-го блока ИМР имеет ряд существенных недостатков. Ее конструкция предусматривала защиту от радиоактивных источников, расположенных на земле. У разрушенного блока излучение падало на ИМР и с боков, и сверху. Управление механизмами машины осуществлялось визуально, что приводило к облучению оператора.
Когда случилась авария на ЧАЭС в 1986 году, Научно-исследовательский и конструкторский институт монтажной технологии (НИКИМТ) уже располагал не только практическим опытом ликвидации различных аварийных ситуаций на ядерных объектах (в том числе ликвидации последствий радиационных аварий на ПО «Маяк» 29.09.1957 в Челябинске-40), но и большим научно-производственным потенциалом.
НИКИМТ было поручено срочно доработать ИМР-2. Силами инженеров по мере выявления недостатков ИМР шла ее модернизация, которая выполнялась буквально за считанные дни. На
Опытном заводе НИКИМТ была создана модификация ИМР-2Д.
Машина ИМР-2Д доставлена в Чернобыль.
— усиленная защита от радиации (коэффициент ослабления до 1000),
— возможность наблюдения за движением и действиями механизмов с помощью телекамер,
— оснащение системами тонкой очистки воздуха от радиоактивных аэрозолей на базе системы фильтрации воздуха от Т-80 и т.п.

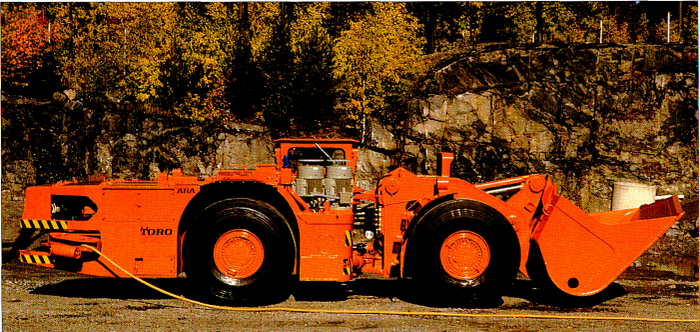
Общий вес машины ИМР-2Д составил 57 тонн за счет 13 тонн свинцовой защиты и дополнительного оборудования. Данные машины, активно искользовались в качестве пункта управления для другой техники, оснащенной радиоуправлением: на видео ниже из ИМР управляют тракторами ДЭТ-250 и ПДМ Sandvik Tamrock TORO 400
НПО «Сибцветметавтоматика» Робот-бульдозер ДЭТ-250
Накануне 9 мая 1986 года, генеральный директор красноярского НПО «Сибцветметавтоматика» М.Е. Царегородцев, принимал в гостях соседа, полковника КГБ. Мужчины сели за стол, поговорить и отметить годовщину Победы в Великой Отечественной войне. В этот момент раздался звонок, в комнату вошла супруга Михаила Егоровича.
— Миша, Москва на проводе.
Царегородцев быстро подошел к телефону. Первым заговорил начальник главка, которому подчинялось НПО «Сибцветметавтоматика».
— Ты про беду нашу слышал?
— Краем уха, — ответил Михаил Егорович.
— Что у тебя есть готового?
Два бульдозера. Один опытный, второй в Балее, на складе. К разговору подключился заместитель председателя Совета министров СССР Борис Евдокимович Щербина. Он был немногословен.
— Тебе даются чрезвычайные полномочия. Любые твои пожелания будут выполнены.
«Сибцветметавтоматика» вела разработку радиоуправляемых бульдозеров ДЭТ-250 Челябинского тракторного завода. По каким-то причинам, после первых испытаний работы были прекращены, а документация в весьма сыром виде направлена в архив.

По заказу «Забайкалзолота» работа возобновилась. Фактически пришлось заново формировать команду инженеров-разработчиков. Часть аппаратуры была изготовлена по имеющимся документам, часть пришлось разрабатывать вновь. Первый бульдозер ДЭТ-250 на радиоуправлении был испытан в деревне Хмелево летом 1983 года. Бульдозер был сдан заказчикам, документация ушла в архив и работы прекратились в очередной раз.
Столичное руководство дало Михаилу Царегородцеву распоряжение в сжатые сроки подготовить 10–12 бульдозеров, оснащенных системой радиоуправления. Такая техника требовалась для работы на ЧАЭС, в районах с высоким уровнем радиации. Вот эти разработки и легли в основу правительственного задания.
Радиоуправляемые бульдозеры ДЭТ-250 были направлены на расчистку завалов и строительство дорог к разрушенному энергоблоку, работы по созданию фундамента под Саркофаг. На этом участке были задействованы 7 бульдозеров, остальные распределены по соседним участкам.

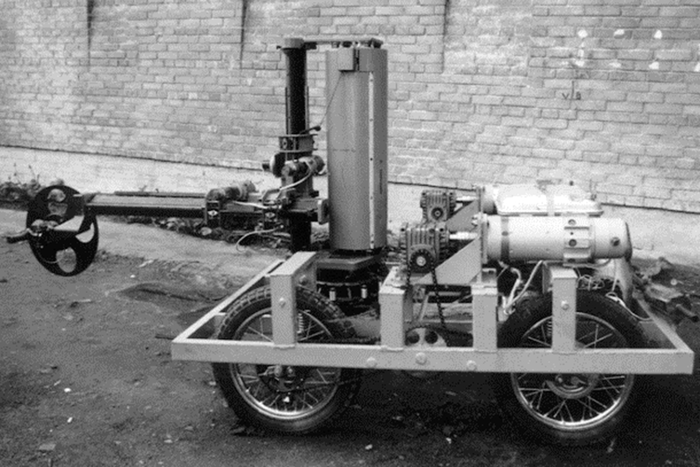
НИКИМТ Робот на основе Foresteri
Поставлена задача разработать управляемого дистанционно робота на основе манипулятора грейферного погрузчика финского производства Foresteri. Для очистки кровли 4-го блока от радиоактивного мусора необходимо было оснастить его опорой с распределенным давлением на крышу, автономной гидравлической станцией и рабочим органом, а также дистанционным управлением и телевизионной системой наблюдения.
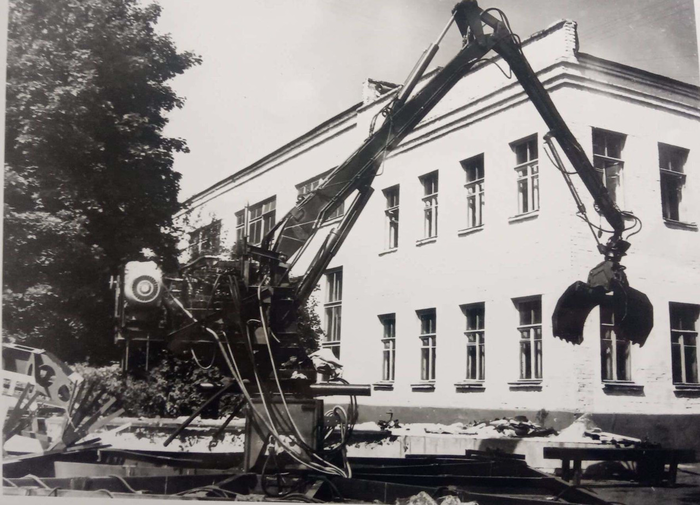
Мной было предложено оснастить робот шагающим приводом, чтобы он мог автономно передвигаться по крыше, но из-за жестких сроков мое предложение было отклонено, что сыграло впоследствии негативную роль
Вячеслав Павлович Соболин, ликвидатор, начальник группы отдел №46 НИКИМТ
2 робота на основе манипулятора Foresteri доставлены в Чернобыль. Но применение роботов было отложено.
Все уповали на работу автоматической зарубежной техники, которая, как оказалось, в тех условиях радиоактивности показала себя не особенно надежной
Вячеслав Павлович Соболин, ликвидатор, начальник группы отдел №46 НИКИМТ
Когда робот потребовался для очистки крыши, оказалось, что во время транспортировки на ЧАЭС роботы были повреждены, нахождение на складе в течение 5 месяцев также негативно сказалось на состоянии робота.
Прикомандированы сотрудники НИКИМТ для починки механизмов робота. Через неделю один из роботов был установлен на крышу одного из зданий для сдирания настила кровли нашпигованного кусками радиоактивного топлива и другого мусора, который вплавился в рубероид. За один день дистанционного управления роботом удалось очистить 100 кв. метров крыши.
И вот встал вопрос о перемещении робота на новое место. Сам он двигаться не мог, здесь бы пригодился автономный ход. Кран Demag способный его переместить был нарасхват, выбить его было очень сложно. Во время перемещения необходимо было выходить на чердак и через окно по рации координировать крановщика.
Роботами на основе манипулятора Foresteri очищено 700 кв. метров крыш различных зданий.
Робот-бульдозер Komatsu D155W

На данный момент произведено всего 36 подобных бульдозеров, в строю остались всего 5, все они принадлежат Komatsu. Ещё один компания собрала для ускорения восстановительных работ в Японии после Великого восточно-японского землетрясения в 2011.
В Чернобыле D155W применялись для уборки высокорадиоактивного «мусора» на территории ЧАЭС, а также участвовали в ликвидации Рыжего Леса. Из-за отсутствия какой-либо защиты от радиации регулярно терял управление на территории, непосредственно прилегающей к АЭС.

Самоходная погрузочно-доставочная машина Sandvik Tamrock TORO 400
Дистанционно-управляемые краны и бетононасосы
На объекте появились три автокрана немецкого концерна Liebherr со 110-метровой стрелой и компьютерным управлением. Они предназначались для строительства Игналинской АЭС в Литве, но судьба распорядилась иначе. Коллега писал тут: Техника Чернобыля. Краны.
При строительстве Саркофага использовались иностранные бетононасосы фирм Worthington, Putzmeister и Schwing. Их основная задача — подача бетона под давлением на определённую высоту. Все бетононасосы были оборудованы пультами дистанционного управления и видеокамерами для дистанционного управления. Коллега подробно рассказывал тут: Техника Чернобыля. Бетононасосы.
Козлова Е. А. «Схватка с неизвестностью», 2011
Козлова Е. А. «Неизвестные герои советской эпохи», 2006
А. Боровой, Е.П. Велихов. Опыт Чернобыля (работы на объекте «Укрытие»), 2012


RUSSIA TOMORROW NEWS // РОССИЯ ЗАВТРА: НОВОСТИ
Говорят, отечественная робототехника безнадежно отстала от мировой. Чушь! Мы заглянем на завод Ижевск Дайнемикс, где делают роботов, побываем в Ижевске и Уссурийске, послушаем противника роботизации Виталия Наливкина.

Роботизированная сборка автомобилей
Роботы-ликвидаторы в Чернобыле 2
Хронология с конца лета 1986 года с уникальными видеокадрами работы роботов-ликвидаторов и комментариями ликвидаторов, руководителей КБ и НИИ.
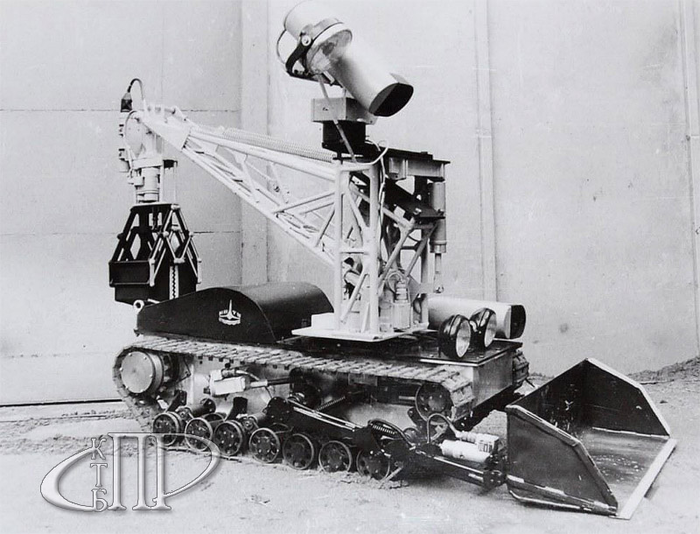
ЦНИИ РТК ТР-Г1 «Федя» и «Вася»
«При создании роботов для работы на ЧАЭС выручил разработанный нами модульный принцип построения роботов, – рассказывает руководитель ЦНИИ РТК Е.И. Юревич. – Именно он позволил в течение двух месяцев разработать, изготовить и поставить на ЧАЭС более 15 различных роботов, собранных из ранее отработанных унифицированных модулей.
У появившегося затем ТР-Б1 аккумуляторы сменил бензиновый генератор с баком на 15 л, который обеспечивал до восьми часов автономной работы. Управлялся он уже по радио.

Модульный принцип построения позволял менять рабочий инструмент робота. Здесь представлен вариант с бульдозерным отвалом:

Модификация тяжелого радиоуправляемого робота ТР-Б1, укомплектованного манипулятором с дисковой пилой. Он использовался для резки рубероидного покрытия крыши.
Модификация c навесным рабочим инструментом:
Сборка и вся работа роботов документировалась с помощью миниатюрных телекамер. Для этого были необходимы видеомагнитофоны. А в то время в СССР только появились первые японские образцы этой техники и одному из заводов в Пскове было дано задание срочно воспроизвести эти устройства. Я поехал на этот завод и договорился об изготовлении 10 опытных образцов. И нам сделали эти первые советские видеомагнитофоны. Они исправно отработали в Чернобыле и остались там вместе с роботами.
Руководитель ЦНИИ РТК Евгений Иванович Юревич


Роботы-бульдозеры ЦНИИ РТК занимались очисткой кровли, сдирая с них все рубероидное покрытие, так как со временем оно стало радиоактивным. Радиоактивный фон снизился в несколько раз, на кровлю отправляют солдат-резервистов. На трубу послали солдат с лопатами, топорами и ломами. Солдаты, очищая кровлю, сбрасывали с нее радиоактивный мусор на нижерасположенную крышу, по которой имелся доступ к провалу четвертого блока, а роботы-бульдозеры ЦНИИ РТК – сгребали этот мусор и сбрасывали в провал.
Происходило это так: боец, одетый в специальное защитное обмундирование, бежал по заранее намеченному маршруту к очередному куску. Штыковой лопатой делал вокруг него два-три надреза и со всех ног несся обратно. Затем бежал второй солдат, чтобы выполнить еще пару надрезов. Далее двое бойцов помещали фрагмент в полиэтиленовый мешок. Следующий кусок убирали уже другие солдаты. А те, что отработали на крыше положенные им секунды, спускались вниз, снимали там всю одежду. Она подлежала утилизации, ведь загрязнилась радиацией. Эти вещи тоже упаковывали в полиэтиленовые мешки. Солдаты мылись, переодевались во все новое.
Полковник в отставке Виктор Инюшин
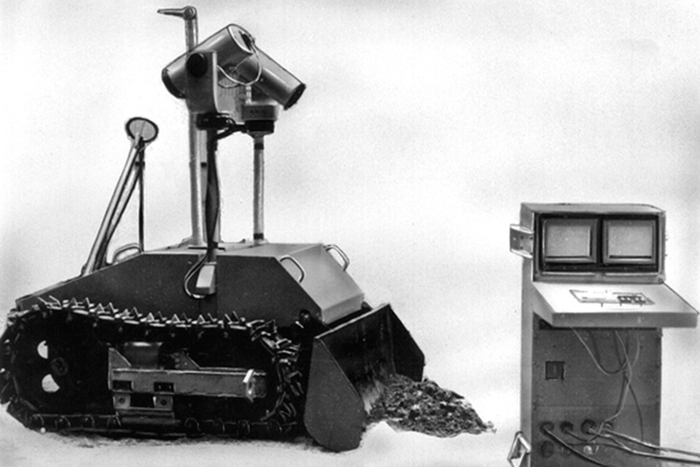
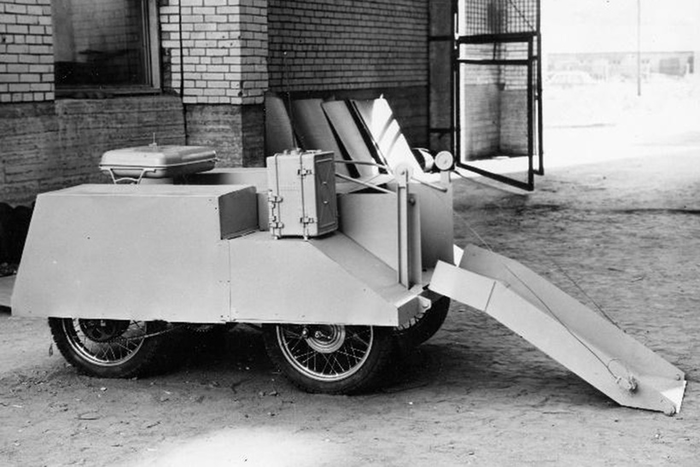
ПО «СПЕЦАТОМ» Гусенечный грузовик
Грузовичок был разработан и изготовлен группой инженеров робототехники из Ленинграда и опытного завода ПО «СПЕЦАТОМ». На стандартной раме с гусеничным электроприводом был изготовлен кузов самосвала и кабелеукладчик. Использовался в машинном зале 4 блока, в высоких полях для вывоза контейнеров с радиоактивными отходами для дальнейшего захоронения на ПЗРО «Подлесный». Погрузку отходов осуществлял финский гидравлический грейферный погрузчик Foresteri.


Вторая попытка MF-3 (ФРГ)
Немецкий робот MF-3 был доработан силами советских инженеров на предприятии «Белоярскатомэнергоремонт» (БАЭР): ранее установленные видеокамеры фирмы «Grundig» вышли из строя и порядком «светили», электроника не выдержала высоких радиоактивных полей. После переоборудования были установлены две отечественные видеокамеры КТП – 67. Летом были проведены ходовые испытания на промышленной площадке, были обнаружены частицы топлива, которые разлетелись, при взрыве на блоке. Манипулятором их собрали в контейнер и отправили на захоронение. Закрепили на конечном звене манипулятора совковую лопату и вновь подняли на кровлю. Однако в тот же день кабель был порван, оператор, видимо, потерял его из вида при маневрировании.

МГТУ имени Н.Э.Баумана Мобот-Ч-ХВ
Коллективу инженеров удалось быстро создать робота благодаря уже имевшемуся опыту по созданию робототехнических средств. За три года до аварии на ЧАЭС, в 1983 году, ученые создали первый макет модели такого робота. По сути, работа над созданием робота для ЧАЭС послужила основой для создания целого конструкторско-технического бюро по мобильным роботам, которое существует и работает (разрабатывает роботы) и сегодня.

Начало сентября 1986
Робот-разведчик РР-Г2 задействован для обследования обстановки непосредственно в районе провала 4-го энергоблока и на кровле 3-го энергоблока.
При переносе вертолетом робота «Мобот-Ч-ХВ» с крыши на крышу сработал электрозамок и «Мобот-Ч-ХВ» разбился. В отчете о результатах применения «Мобот Ч-ХВ» по уборке с крыши 3-го блока радиоактивных обломков и мусора от разрушенного 4-го блока оказались успешными:
Очистка кровли
Зона «Н». Подбор радиоактивных кусков и мусора ковшом, манипулятором, транспортировка и сброс в развал 4-го блока.
Сброшено в 4-й блок 2,2 тонны радиоактивных продуктов очищено 150 м2 крыши. Радиационный фон понижен в 2. 3 раза. Очистка кровли до 15.09.86 г
Правительственная комиссия поручила МВТУ им. Н.Э. Баумана срочно изготовить еще два комплекса «Мобот Ч-ХВ» для завершения работ на крыше 3-го энергоблока и в машинном зале.
Вторая половина сентября 1986
Спасательная операция MF-2 Joker
Немецкий робот MF-2, застявщий в первой части, все еще находится на крыше 4-го энергоблока.
MF-2 создал массу проблем: встал на пути, по которому бегали солдаты, сбрасывавшие продукты взрыва в 4-й реактор вручную, лопатами. На станции их звали «биороботами», недобрым словом поминая тех руководителей, кто еще в самом начале ликвидации последствий аварии пообещал, что на кровлях не будет людей, все сделают машины.
Начальник лаборатории ВНИИТрансмаш, доктор технических наук Михаил Маленков
Специально смонтированный сюжет спасения немецкого MF-2 Joker:
Солдаты-«партизаны» пробовали вытащить его из завала лебедкой с монтажно-тяговым механизмом «лягушка» (на видео), но она сломалась. Только через два дня его смогли зацепить краном парни из отряда дозиметрической разведки и снять на землю.
«Joker» больше не заработал. Электронный мозг не выдержал такой дозовой нагрузки. Доза в месте его выгрузки и работы составляла более 10000 бэр (100 Зв). Теперь он стал никому не нужным фонящим кусоком железа.
Развал реактора необходимо было контролировать, ежедневно применялись вертолёты для сброса буев, позволяющих замерять данные. Вертолётчики сильно облучались. Группа Белоярского Атомэнергоремонта (БАЭР) Арнольда Георгиевича Шастина разработала устройство «Канатоход»: оно двигалось по канату, переброшенному ракетой над развалом четвертого реактора, доходило до точки и спускало на лебедке «корзину», оснащённую камерой и разными датчиками (измерение фона, температуры, отборы проб воздуха и пыли). На все уходило 15 минут, а кабеля для управления хватало на четыре хода (обычно кабель терял электроизоляцию от радиационного фона за два часа).
Устройство было готово, можно было обойтись без вертолётов, но возникла проблема. Научным центром процесса ликвидации последствий аварии являлся Курчатовский институт.
Его представитель, прибывший за место академика Легасова академик Евгений Велихов ответил: «Видите, на вертодроме буи лежат, они все с новой изоляцией». Я в ответ говорю, что мы пилотов вертолётов освободим и сможем отбирать пробы, в том числе и образцы на анализ. Он отвечает: «Достаточно той информации, которая есть». Так прошло две недели. Ко мне подходит заместитель Велихова: «Арнольд, он согласен, давайте. Что случилось? Да эта изоляция ещё хуже, чем старая!» Так мы пустили в ход нашего «канатоходца».
Арнольд Георгиевич Шастин
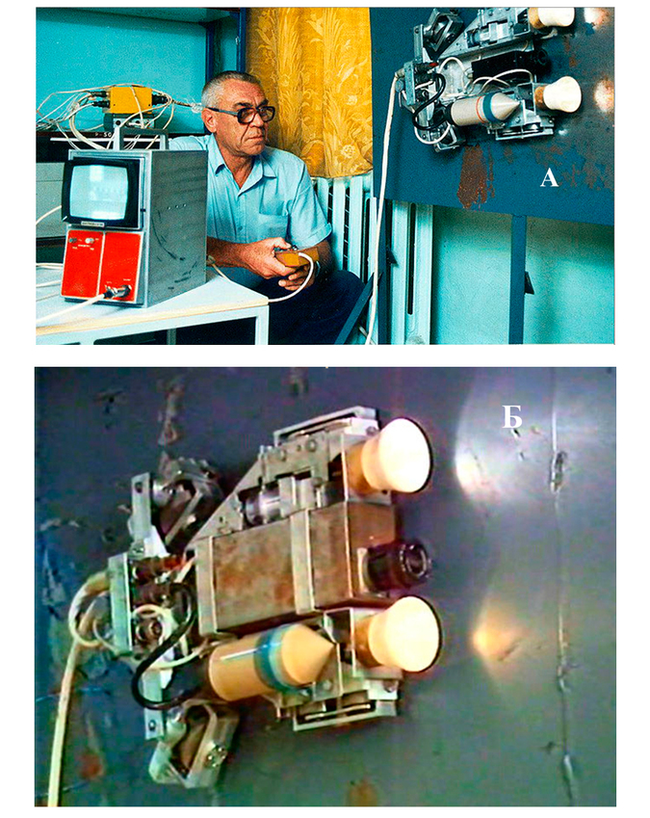
Группа инженеров Белоярского Атомэнергоремонта (БАЭР), разработала несколько типов других машин: робот «Пылесос» для дистанционного ведения работ по дезактивации поверхностей помещений и его облегчённый аналог «Урал» (на базе пылесосов «Урал»), автоматическую газорезку, самоходный модуль на магнитных двигателях и другие.
Робот-магнитоход умел передвигаться по металлическим поверхностям благодаря мощным редкоземельным магнитам.
При обработке кровли клеевым раствором для сбора радиоактивной пыли и сокращения радиоактивного излучения от рубероида вертолет Ми-8 Владимира Воробьева задевает лопастями трос одного из кранов и терпит крушение вдоль стены третьего реактора в нескольких десятках метров от самого реактора.
А это уже было где-то в районе 17 часов, на закате, и мы заходили как раз против солнца, которое слепило. Там стояли три крана, мы еще с утра жаловались, что они мешают нам. Раньше на тросе крана висела рельса, а тут ее убрали, и остался один трос, а без рельса он уже не виден.
Я за Вовкой висел в ста метрах. Володька шел-шел, и тут вдруг — бах! Брызги лопастей, вертолет переворачивается — и вниз.
Это было над третьим реактором, еще повезло, что вертолет упал с высоты 100 метров не на реактор, уже заглушенный, а вдоль его стенки на землю. Если бы на реактор упал Ми-8 с полной заправкой, мало бы не показалось.
Командир другого Ми-8 Вячеслав Жиронкин
После катастрофы полеты над реакторами были запрещены, доставка роботов осуществлялась только башенными кранами.
Завершение строительства объекта «Укрытие» (он же «саркофаг»).
МГТУ имени Н.Э.Баумана Мобот-Ч-ХВ-2
Разработчики с учетом опыта эксплуатации «Мобот Ч-ХВ» существенно модернизировали комплекс и расширили выполняемые им функции:
— оснастили манипулятор сменным двупалым схватом;
— оснастили отбойным молотком, устанавливаемым вместо схвата или на фронтальном погрузчике;
— оснастили полуавтоматическим стыковочным устройством для снятия и установки робота на кровлю 3-го энергоблока;
— для увеличения силы тяги увеличили массу робота;
— увеличили грузоподъемность и зону обслуживания манипулятора и фронтального погрузчика;
— изменили конструкцию кабелеукладчика и место выхода кабеля из корпуса робота;
— усовершенствовали и дополнили систему управления, ввели систему акустической связи;
доработали пост управления.
Данные роботы обладали функциональностью и маневренностью совершенного нового уровня. Робот позволял выполнять сложные задачи без присутствия людей на крыше 3-го энергоблока, такие как: дробление графитовых блоков и бетонных обломков отбойным молотком, уборка и контейнирование оставшихся на крыше радиоактивных обломков, демонтаж стальной трубы, возведение опалубки по периметру крыши зоны “М” для бетонирования, размещение маяков в заданных точках крыши для определения высоты уровня заливаемого на кровлю бетона. По существу, с помощью роботов, впервые удалось выполнить весь перечень подготовительных работ перед бетонированием кровли без выхода на нее людей.

В результате несогласованных действий персонала в зоне работ на кабель одного из роботов «Мобот-Ч-ХВ-2» была поставлена бетонная плита. Робот вышел из строя и связь с ним была потеряна. Во всех похожих ситуациях ранее, при застревании роботов или при переворачивании при наезде на препятствие, на кровлю приходилось выводить людей.
Специалисты МГТУ и других предприятий разработали план эвакуации робота с использованием второго робота «Мобот-Ч-ХВ-2» и дистанционно управляемого подъемного крана Demag. Через два дня специально разработанное приспособление было спущено подъемным краном на кровлю. Робот взял манипулятором за переднюю скобу и тянул приспособление за собой до требуемого положения, после чего надел крюк от тросса в буксирное кольцо поврежденного робота. Подъемный кран Demag подвесным крюком начал медленно тащить второй конец троса, работающий робот контролировал и фронтальным погрузчиком поправлял траекторию движения поврежденного робота. Впервые в мировой практике мобильный робот был эвакуирован с помощью второго робота.
Из акта правительственной комиссии о результатах работы роботов «Мобот-Ч-ХВ-2» на крыше «М» 3-го энергоблока ЧАЭС от 13 апреля 1987 года:
«…Данные работы проводились в период с 7 января по 10 апреля 1987 года. В результате уборки площадей кровли уровень фона по гамма-излучению уменьшался в 3-5 раза. Весь объем работ был выполнен без привлечения на вспомогательные операции личного состава, что полностью исключило необходимость вывода человека в зону с повышенной радиацией.
Выполнение указанного объема работ роботизированными комплексами «МОБОТ» позволило согласно проведенным расчетам исключить 800 человеко-выходов на крышу «М» 3-его энергоблока с получением предельно допустимых доз облучения для личного состава.
Из всех имеющихся в наличии робототехнических средств для работы на кровле «МОБОТ» МВТУ им. Н.Э.Баумана является наиболее совершенной системой и может быть использован как прототип для дальнейшей разработки подобных телеуправляемых роботизированных систем…»
д/ф Чернобыль: Два цвета времени (мини–сериал 1986)