Электромагнитные волны и их свойства. Радиолокация и её применение




![]()
![]()
Электромагнитная волна – это меняющееся с течением времени и распространяющееся в пространстве электромагнитное поле.
Свойства электромагнитных волн:
1.Возникают при ускоренном движении зарядов.
3.Имеют скорость в вакууме 3٠10 8 м/с.
5.Проникающая способность и энергия зависит от частоты.
7.Обладают интерференцией и дифракцией.
Свойство отражения электромагнитных волн используется в радиолокации.
Радиолокация – это обнаружение и определение местонахождения объектов с помощью радиоволн.
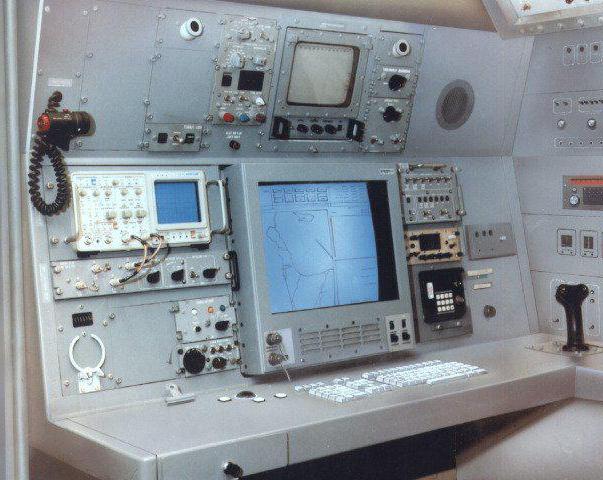
Радиолокационная установка (радиолокатор) состоит из передающей и приёмной частей.
От передающей антенны идёт электромагнитная волна, доходит до объекта и отражается.
Радиолокаторы используют в военных целях, а также службой погоды для наблюдения за облаками. С помощью радиолокации исследуются поверхности Луны, Венеры и других планет.
36.Модели Земли и планет. Физические условия на планетах и их атмосферы.
Планеты Солнечной системы: Меркурий, Венера, Земля, Марс, Юпитер, Сатурн, Уран, Нептун.
Планеты делятся на две группы: планеты земной группы и планеты-гиганты.
Все данные планеты имеют небольшие размеры и массу. Средняя плотность этих планет в несколько раз превосходит плотность воды. Они медленно вращаются вокруг своих осей. У них мало спутников (у Меркурия и Венеры их вообще нет, у Марса два крохотных, у Земли – один).
В отличие от Меркурия, который практически лишён атмосферы, Земля, Венера и Марс обладают ею. Атмосфера Венера и Марса состоит в основном из углекислого газа, но у Венеры атмосфера во много раз плотнее. Температура у поверхности Венеры очень высокая: 500 0 С (парниковый эффект). Состав облаков: капельки воды и серной кислоты.
В атмосфере Марса возникают ураганные ветры, которые длятся по несколько месяцев (пылевые бури).
Все эти планеты имеют большие размеры и массу. Юпитер превосходит Землю по объёму в 1320 раз, а по массе – в 318 раз. У всех планет-гигантов низкая средняя плотность. Они очень быстро вращаются вокруг своих осей (для Юпитера один оборот за 10 часов).
Планеты-гиганты отличаются большим числом спутников и имеют кольца.
У всех планет-гигантов имеются сильные магнитные поля.
Какое свойство радиоволн используется в радиолокации

5.1. Основные свойства радиоволн и методы радиолокации
5.1.1. Основные свойства радиоволн, используемые в радиолокации
Основные свойства радиоволн, используемые в радиолокации:
1.
Постоянство скорости распространения радиоволн в однородной среде.
Скорость распространения радиоволн в воздухе принимается равной скорости ЭМВ в вакууме
Это свойство используется для определения дальности до цели по времени запаздывания радиосигнала на пути РЛС-цель-РЛС.
В диэлектрике скорость распространения радиоволн
v
меньше чем вакууме и определяется выражением

,
где: e и m – относительные диэлектрическая и магнитная проницаемости среды (e ³1; m ³1).
2.
Прямолинейность пути распространения радиоволн.
Несмотря на возможное искривление пути распространения радиоволн под влиянием неоднородности атмосферы (рефракция) в радиолокации с высокой эффективностью используется допущение о прямолинейности распространения радиоволн.
Это свойство используется для определения угловых координат цели по направлению прихода отраженного от нее сигнала.
3.
Отражение радиоволн от границы двух сред.
Отражение радиоволн (вторичное излучение радиоволн) для радиолокационных объектов бывает: зеркальное, резонансное и диффузное.
Зеркальное
отражение наблюдается, если размер объекта много больше длины облучающей радиоволны, а поверхность объекта гладкая (размеры неоднородностей на поверхности значительно меньше длины облучающей радиоволны).
При зеркальном отражении выполняются законы геометрической оптики.
Примеры зеркального отражения радиоволн: отражение радиосигнала от ровной земной или водной поверхности, фокусировка луча в зеркальной антенне.

Рис.1. Зеркальное отражение радиоволн от земной (водной) поверхности

Рис.2. Принцип действия зеркальной антенны Кассегрена
Резонансное
отражение происходит при условии, что размеры объекта или отдельных его частей кратны половине длины облучающей волны. В этом случае может возникать резонансное вторичное излучение большой интенсивности.
Пример резонансного отражения радиоволн – отражение радиосигнала от облака пассивных помех, состоящего из полуволновых отрезков проводника.
Диффузное
отражение имеет место, когда линейные размеры объекта или его отдельных элементов сравнимы или больше длины облучающей волны.
Длину волны РЛС следует выбирать так, чтобы цель была диффузным отражателем.

Рис.3. Диффузное отражение радиоволн
4. Изменение частоты радиосигнала при отражении его от движущегося объекта (эффект Доплера).
Эффект Доплера
стоит в том, что если объект отражающий или излучающий сигнал движется, то неподвижный наблюдатель зафиксирует изменение частоты принимаемого сигнала. Если объект движется к наблюдателю – частота сигнала растет, если от наблюдателя – уменьшается.
Наглядной иллюстрацией влияния скорости объекта на частоту является звук тепловозного гудка, который слышат пассажиры на неподвижном перроне: у приближающегося тепловоза звук гудка кажется выше, у удаляющегося – ниже.
На основании эффекта Доплера определяется радиальная скорость цели
Vr
.
Непосредственно измеряется так называемая «доплеровская добавка частоты»

,
как разность между частотами излученного (
fизл
) и принятого от цели (
fприн
) сигналов.
Радиальная составляющая скорости движения цели определяется в соответствии с выражением:

,
где: l –длина волны излученного РЛС сигнала.
5.
Интерференция радиоволн.
Интерференция
радиоволн, геометрическое сложение в пространстве двух (или нескольких) волн, при котором в разных точках получается усиление или ослабление амплитуды результирующей волны. Интерференция возможна, если волны когерентны.
Простейший случай интерференции – сложение двух волн одинаковой частоты при совпадении направления их распространения. В этом случае, для синусоидальных (гармонических) колебаний, амплитуда результирующей волны в какой-либо точке пространства

,
где A1 и A2 — амплитуды складывающихся волн, а φ – разность фаз между ними в рассматриваемой точке.
Разность фаз φ изменяется от точки к точке и в пространстве получается распределение амплитуд результирующей волны с чередующимися максимумами и минимумами. Иллюстрирует эту картину опыт Юнга, выполненный в оптическом диапазоне.
Явление интерференции сонаправленных волн широко используется при создании антенных систем с заданной формой диаграммы направленности. Именно интерференция позволяет создать узкую диаграмму направленности ФАР, состоящей из множества слабонаправленных излучателей.

Рис.4. Интерференция световых волн в опыте Юнга
Другой важный случай интерференции – сложение двух волн, распространяющихся в противоположных направлениях (например, прямой и отражённой). В этом случае получаются стоячие волны – характерное для интерференции распределение амплитуд с чередующимися максимумами и минимумами вдоль оси распространения волн остаётся неподвижным в пространстве (или перемещается столь медленно, что за время, необходимое для наблюдений, максимумы и минимумы не успевают сместиться на величину, сравнимую с расстоянием между ними).
Стоячие волны используются в объемных резонаторах.
В волноводных трактах и в антенных системах стоячие волны – негативный фактор, для минимизации которого все элементы волноводов и антенн должны быть согласованы между собой по величине волнового сопротивления. В случае рассогласования между элементами тракта, ЭМВ будет частично отражаться от места их соединения и в волноводе возникнет стоячая волна.
5.1.2. Методы измерения дальности
а)
Метод непосредственного измерения
. Непосредственно измеряется время распространения радиоволн от РЛС до цели и обратно
tз
, его называют
временем запаздывания
отраженного сигнала:

,
где: 
– время приема и излучения сигнала.
Дальность цели определяется в соответствии с выражением:

,
б)
Частотный метод измерения дальности.
Используется с ЗС в виде длинного ( 
) ЛЧМ радиоимпульса с законом изменения частоты

,
f
н
–
начальное значение частоты, как правило совпадает со значением несущей частоты;
f
к
–
максимальное значение частоты, достигаемое к концу импульса;

В течение времени 
в РЛС одновременно присутствуют ЗС и принятый сигнал, задержанный на
tз
. За это время дальность определяется по разнице частот сигналов

,

.
Если цель движется, существует ненулевая доплеровская добавка частоты
F
д
¹ 0. Поэтому процедура частотного измерения дальности включает три последовательных этапа:
3) определяется дальность.
в)
В системах активной локации с активным ответом
кроме времени запаздывания
tз
, появляется еще время срабатывания ответчика (ретранслятора)
t
ср
. Это время необходимо ответчику на прием ЗС, его анализ, формирование и излучение в пространство ответного сигнала.
Для исключения различия времен срабатывания
t
ср
у различных ответчиков, фиксированное время срабатывания
t
ср фикс
конструктивно вносится во все ответчики.
Время запаздывания в этом случае определяется как

,
а дальность вычисляется как в способе а).
г)
В системах пассивной радиолокации
определение дальности основывается на различных вариантах триангуляционных (основанных на свойствах треугольников) измерений.
Для построения измерительного треугольника используются две точки приема – основная А и дополнительная Б, разнесенные на фиксированное расстояние d, называемое базой измерения, третьей вершиной треугольника является цель.

Непосредственно измеряются углы e, a, a1, а дальность находится из соотношения:

.
5.1.3. Методы измерения угловых координат
Для измерения угловых координат антенны должны быть узконаправленными.
а)
Метод максимума
является простейшим методом измерения угловых координат. Применяется в обзорных РЛС.
Для определения значения азимута β организуется круговое сканирование ДН с заданной угловой скоростью wл. Измеряемым параметром является время от момента прохождения лучом направления на север (t=0) до момента получения максимума отраженного от цели сигнала tц. Азимут цели рассчитывается из соотношения:
Азимут цели рассчитывается из соотношения βц= tц´ wл.

Недостатком метода максимума является низкая точность измерения углов, сравнимая с шириной ДН (минимальная практически достижимая ширина составляет 0,7°).
б)
Методы моноимпульсной пеленгации (мгновенной равносигнальной зоны)
основаны на
суммарно-разностной обработке
принимаемых сигналов.
Суммарно-разностная обработка требует использования нескольких ДН (по паре на каждую измеряемую угловую координату), рассогласованных между собой. Такие ДН называются
парциальными
. Величина угла рассогласования Dj находится в пределах от половины до полной ширины лепестка ДН. Направление пересечения ДН1 и ДН2 принято называть
равносигнальным направлением (РСН)
.
Рабочая область
измерителя ограничена максимумами парциальных диаграмм.

В рабочей области для измерения угла φ сигналы, принятые ДН1 (А1) и ДН2 (А2), используются в разностном и суммарном каналах РПрУ:
А1-А2= АD – разностный канал;
А1+А2= АS – суммарный канал.
Сигнал разностного канала АD – пропорционален ошибке между РСН и направлением на цель, а сигнал суммарного канала АS – используется для нормировки этой ошибки.
Достоинством моноимпульсных методов является высокая точность измерения (ошибки составляют единицы угловых минут), а недостатками являются сложность антенной системы и невозможность измерения, если цель выходит за пределы рабочей области.
5.1.4. Методы измерения радиальной скорости
Радиальная скорость цели
Vr
.
(проекция линейной скорости цели Vц на линию РЛС – цель) определяется на основании эффекта Доплера.
Непосредственно измеряется так называемая «доплеровская добавка частоты» как разность между частотами излученного (
fизл
) и принятого от цели (
fприн
) сигналов
.
Радиальная составляющая скорости движения цели определяется в соответствии с выражением:

,
где:
l
–длина волны излученного РЛС сигнала.
F
д
и
Vr
имеют положительные значения если цель приближается к РЛС, и отрицательные – если цель удаляется от РЛС.
Для измерения радиальной скорости, как правило, используются устройства, построенные на узкополосных частотных фильтрах.
Для оценки радиальной скорости (например, в доплеровских РЛС обнаружения) как правило, формируется набор фильтров, полосы пропускания которых равны Dfф, следуют одна за другой и перекрывают весь диапазон возможных доплеровских добавок.
Количество фильтров зависит от возможного диапазона скоростей цели или от диапазона скоростей, представляющих интерес для работы конкретной РЛС. Ширина полосы пропускания каждого фильтра согласуется с частотными характеристиками ЗС.

5.1.5. Радиолокационная информация
Радиолокационная информация (РЛИ)
– информация о воздушной обстановке, полученная радиолокационными методами.
РЛИ включает
: сведения о наличии или отсутствии в пространстве целей, их координатах и траектории, информацию о действующих помехах.
Сведения о наличии или отсутствии целей определяются для каждого элемента разрешения в зоне видимости РЛС.
Для однозначного определения положения цели в трехмерном пространстве РЛС необходимо определить три координаты цели. Поскольку, большинство РЛЦ являются высокоподвижными объектами, необходимо измерять и их скорость, ее принято считать еще одной – четвертой измеряемой координатой.

На основании физических свойств радиоволн непосредственно измеряются:
–
дальность
до цели
Дц
–
расстояние между точкой стояния РЛС и целью (иногда ее называют наклонной дальностью);
–
угловые координаты
–
углы наклона линии РЛС – цель в вертикальной (
угол места
цели
e
) и горизонтальной (
азимут
b
) плоскостях относительно горизонта и направления на север соответственно.
–
радиальная скорость
цели
Vr
–
проекция линейной скорости цели Vц на линию РЛС – цель.

Для определения траектории движения цели необходимо многократно последовательно во времени измерять значения координат цели, а затем связать полученные точки единой линией.
Информация о действующих помехах отображается на индикаторах РЛС, а также на индикаторных элементах системы помехозащиты.

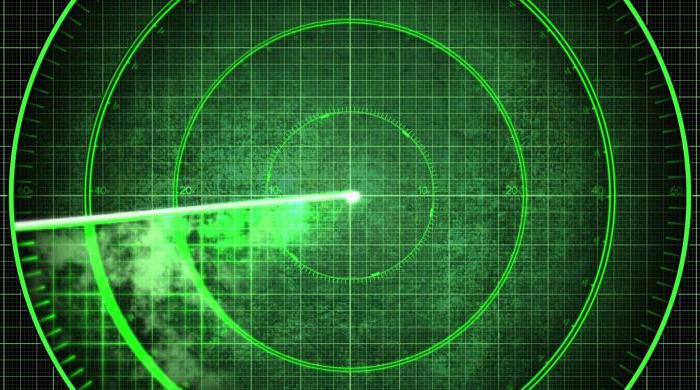
Рис.3. Вид экрана индикатора кругового обзора
РЛИ получают РЛС на основе анализа параметров радиосигналов целей и помех.
РЛИ в ЗРС используется для отображения воздушной обстановки на индикаторах, планшетах обстановки и т.п., а также для решения задач пуска и наведения ЗУР.
5.1.6. Методы радиолокации
Для получения РЛИ используют следующие методы:
Метод активной радиолокации с пассивным ответом
основан на облучении цели радиосигналом (
активная локация
) и приеме отраженных (рассеянных) целью радиоволн приемным устройством РЛС (
пассивный ответ
). Применяется, как правило, для поиска целей и измерения их координат.
Метод активной радиолокации с активным ответом
– при облучении цели радиосигналом от РЛС (
активная локация
) срабатывает установленный на цели ретранслятор (ответчик), который излучает ответный радиосигнал с заданными параметрами (
активный ответ
). Эти сигналы принимаются РЛС. Применяется, как правило, для определения государственной принадлежности целей и для определения координат ЗУР.
Метод пассивной радиолокации
заключается в приеме сигналов собственного радиоизлучения целей (радиотепловое излучение тел, излучение собственных радиотехнических устройств и др.). Применяется, как правило, для определения угловых координат целей – постановщиков активных помех.
Комбинационные методы
, наиболее широко распространены в современных многофункциональных РЛС, они включают в себя вышеперечисленные методы в различных сочетаниях.
Радиолокация – это совокупность научных методов и технических средств, служащих для определения координат и характеристик объекта посредством радиоволн. Исследуемый объект часто именуют радиолокационной целью (или просто целью).
Принцип радиолокации
Радиотехническое оборудование и средства, предназначенные для выполнения задач радиолокации, получили название радиолокационных систем, или устройств (РЛС или РЛУ). Основы радиолокации базируются на следующих физических явлениях и свойствах:
Историческая справка
На способность радиоволн к отражению указывали великий физик Г. Герц и русский электротехник А.С. Попов еще в конце XIX века. Согласно патенту от 1904 года, первый радар создал немецкий инженер К. Хюльмайер. Прибор, названный им телемобилоскопом, использовался на судах, бороздивших Рейн. В связи с развитием авиационной техники применение радиолокации выглядело очень перспективным в качестве элемента противовоздушной обороны. Исследования в этой области велись передовыми специалистами многих стран мира.
В 1932 году основной принцип радиолокации описал в своих работах научный сотрудник ЛЭФИ (Ленинградского электрофизического института) Павел Кондратьевич Ощепков. Им же в сотрудничестве с коллегами Б.К. Шембель и В.В. Цимбалиным летом 1934 года был продемонстрирован опытный образец радиолокационной установки, обнаружившей цель на высоте 150 м при удалении 600 м. Дальнейшие работы по совершенствованию средств радиолокации сводились к увеличению дальности их действия и повышению точности определения местоположения цели.

Виды радиолокации
Природа электромагнитного излучения цели позволяет говорить о нескольких видах радиолокации:
Каждому виду свойственны свои достоинства и недостатки.

Методы и оборудование
Все средства радиолокации по используемому методу разделяют на РЛС непрерывного и импульсного излучения.
Первые содержат в своем составе передатчик и приемник излучения, действующие одновременно и непрерывно. По этому принципу были созданы первые радиолокационные устройства. Примером такой системы могут служить радиоальтиметр (авиационный прибор, определяющий удаление летательного аппарата от поверхности земли) или известный всем автолюбителям радар для определения скоростного режима транспортного средства.
При импульсном методе электромагнитная энергия излучается короткими импульсами в течение нескольких микросекунд. После генерации сигнала станция ведет работу только на прием. После улавливания и регистрации отраженных радиоволн РЛС передает новый импульс и циклы повторяются.
Режимы работы РЛС
Существует два основных режима функционирования радиолокационных станций и устройств. Первый – сканирование пространства. Он осуществляется по строго заданной системе. При последовательном обзоре перемещение луча радара может носить круговой, спиральный, конический, секторный характер. Например, решетка антенны может медленно поворачиваться по кругу (по азимуту), одновременно сканируя по углу места (наклоняясь вверх и вниз). При параллельном сканировании обзор осуществляется пучком радиолокационных лучей. Каждому соответствует свой приемник, ведется обработка сразу нескольких информационных потоков.
Режим слежения подразумевает постоянную направленность антенны на выбранный объект. Для ее поворота, согласно с траекторией движущейся цели, используются специальные автоматизированные следящие системы.
Алгоритм определения дальности и направления
Скорость распространения электромагнитных волн в атмосфере составляет 300 тыс. км/с. Поэтому, зная время, затраченное транслируемым сигналом на преодоление расстояния от станции до цели и обратно, легко вычислить удаленность объекта. Для этого необходимо точно зафиксировать время отправки импульса и момент принятия отраженного сигнала.
Для получения информации о местонахождении цели используется остронаправленная радиолокация. Определение азимута и элевации (угла места или возвышения) объекта производится антенной с узким лучом. Современные РЛС используют для этого фазированные антенные решетки (ФАР), способные задавать более узкий луч и отличающиеся высокой скоростью вращения. Как правило, процесс сканирования пространства совершается минимум двумя лучами.
Основные параметры систем
От тактических и технических характеристик оборудования во многом зависит эффективность и качество решаемых задач.
К тактическим показателям РЛС причисляют:
Заданные тактические характеристики закладываются при проектировании устройств посредством определенных технических параметров, среди которых:
На боевом посту
Радиолокация – это универсальный инструмент, получивший широкое распространение в военной сфере, науке и народном хозяйстве. Области использования неуклонно расширяются благодаря развитию и совершенствованию технических средств и технологий измерений.
Применение радиолокации в военной отрасли позволяет решить важные задачи обзора и контроля пространства, обнаружения воздушных, наземных и водных мобильных целей. Без радаров невозможно представить оборудование, служащее для информационного обеспечения навигационных систем и систем управления орудийным огнем.
Военная радиолокация является базовой составляющей стратегической системы предупреждения о ракетном нападении и комплексной противоракетной обороны.

Радиоастрономия
Посланные с поверхности земли радиоволны также отражаются от объектов в ближнем и дальнем космосе, как и от околоземных целей. Многие космические объекты невозможно было полноценно исследовать лишь с использованием оптических инструментов, и только применение радиолокационных методов в астрономии позволило получить богатую информацию об их природе и структуре. Впервые пассивная радиолокация для исследования Луны была применена американскими и венгерскими астрономами в 1946 году. Примерно в то же время были случайно приняты и радиосигналы из космического пространства.
У современных радиотелескопов приемная антенна имеет форму большой вогнутой сферической чаши (подобно зеркалу оптического рефлектора). Чем больше ее диаметр, тем более слабый сигнал антенна сможет принять. Часто радиотелескопы работают комплексно, объединяя не только устройства, расположенные недалеко друг от друга, но и находящиеся на разных континентах. Среди важнейших задач современной радиоастрономии – изучение пульсаров и галактик с активными ядрами, исследование межзвездной среды.

Гражданское применение
В сельском и лесном хозяйстве радиолокационные устройства незаменимы при получении информации о распределении и плотности растительных массивов, изучении структуры, параметров и видов почв, своевременном обнаружении очагов возгораний. В географии и геологии радиолокация используется для выполнения топографических и геоморфологических работ, определения структуры и состава пород, поиска месторождений полезных ископаемых. В гидрологии и океанографии радиолокационными методами осуществляется контроль состояния главных водных артерий страны, снегового и ледяного покрова, картографирование береговой линии.
Радиолокация – это незаменимый помощник метеорологов. РЛС легко выяснит состояние атмосферы на удалении десятков километров, а по анализу полученных данных составляется прогноз изменения погодных условий в той или иной местности.

Перспективы развития
Для современной радиолокационной станции главным оценочным критерием выступает соотношение эффективности и качества. Под эффективностью понимаются обобщенные тактико-технические характеристики оборудования. Создание совершенной РЛС – сложная инженерная и научно-техническая задача, осуществление которой возможно только с использованием новейших достижений электромеханики и электроники, информатики и вычислительной техники, энергетики.
По прогнозам специалистов, в ближайшем будущем главными функциональными узлами станций самого разного уровня сложности и назначения будут твердотельные активные ФАР (фазированные антенные решетки), преобразующие аналоговые сигналы в цифровые. Развитие вычислительного комплекса позволит полностью автоматизировать управление и основные функции РЛС, предоставив конечному потребителю всесторонний анализ полученной информации.