Усилители рулевого управления
 Водители со стажем на всю жизнь запомнили специфику управления машиной без усилителя рулевого управления: на стоящем автомобиле колеса провернуть очень сложно, крутить рулем необходимо в движении. К счастью, необходимость в овладении подобными навыками осталась в прошлом, практически все современные машины оснащены усилителями руля.
Водители со стажем на всю жизнь запомнили специфику управления машиной без усилителя рулевого управления: на стоящем автомобиле колеса провернуть очень сложно, крутить рулем необходимо в движении. К счастью, необходимость в овладении подобными навыками осталась в прошлом, практически все современные машины оснащены усилителями руля.
В автосалонах ГК FAVORIT MOTORS представлены автомобили с разными типами усилителей рулей.
Классификация усилителей рулевого управления
Гидравлический усилитель руля (ГУР)

Это один из наиболее распространенных типов, применяемый с 50-х годов прошлого века. Состоит из насоса, гидроцилиндра, бачка с запасом гидравлической жидкости (также называют маслом ГУР) и распределителя, соединенных между собой трубками. Насос, соединенный приводом с двигателем, создает необходимое давление в системе. Гидроцилиндр преобразует давление жидкости в перемещение поршня и штока, тем самым облегчает вращение колес.
Гидравлический усилитель нравится опытным водителям по той причине, что обеспечивает информативное и точное управление. При выходе из строя, руль будет сложно вращать, но все же доехать до сервиса можно.
Минусы такой системы:
При нарушении герметичности системы жидкость постепенно уходит. Если это вовремя не заметить, то из строя может выйти дорогостоящий узел. Когда вы заметите снижения уровня жидкости в бачке ГУР, необходимо немедленно связаться с технической службой ГК FAVORIT MOTIRS. Квалифицированные мастера в короткие сроки устранят неисправность.
Электрический усилитель руля (ЭУР)
 Миром правит электричество, и сейчас большое распространение получили электрические усилители руля, состоящие из электродвигателя, механической передачи и системы управления (датчиков). Датчик фиксирует действия водителя и активирует мотор, интегрированный в рейку рулевого колеса. В результате от водителя требуется минимальное усилие.
Миром правит электричество, и сейчас большое распространение получили электрические усилители руля, состоящие из электродвигателя, механической передачи и системы управления (датчиков). Датчик фиксирует действия водителя и активирует мотор, интегрированный в рейку рулевого колеса. В результате от водителя требуется минимальное усилие.
Такая система компактна, не так уж дорога, требует минимальных настроек. Вероятность выхода из строя, по сравнению с гидравлической, мала. Чаще всего причина неисправности состоит в окислении контактов или неисправности датчика. Бывают случаи, когда причиной дефекта становятся сбои в работе блоков управления или скачки напряжения бортовой сети. В этом случае на панели приборов загорится сигнал неисправности, и нужно оперативно связаться с технической службой ГК FAVORIT MOTORS.
Электрогидравлический усилитель руля (ЭГУР)
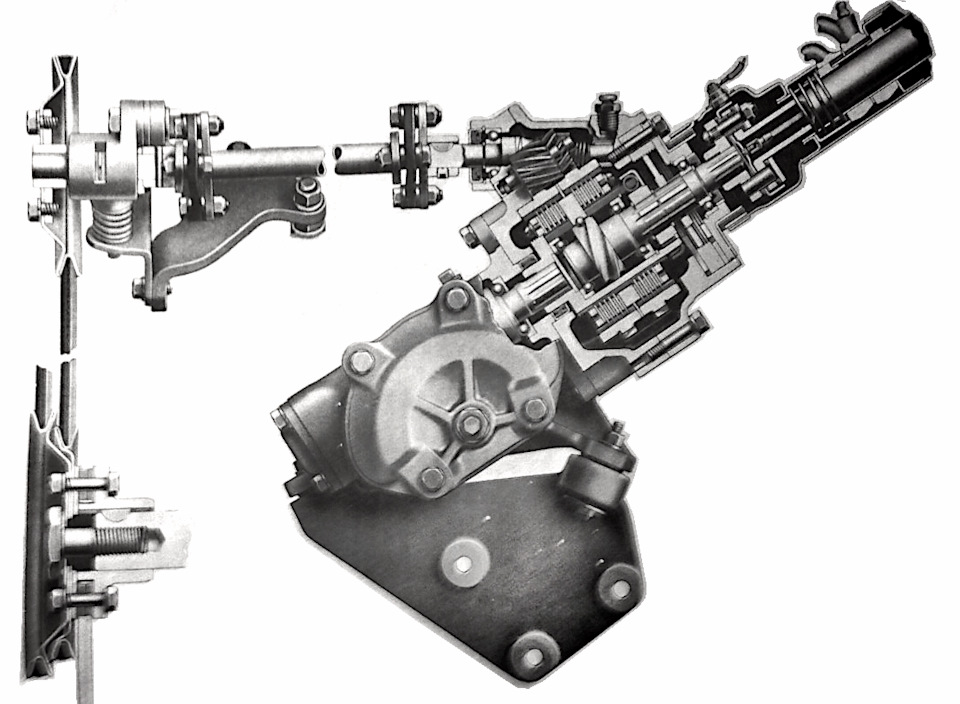
Замкнутая система состоит из тех же элементов, что и классический гидравлический усилитель руля: насос, гидроцилиндр, распределитель, бачок с запасом жидкости ГУР. Основное отличие в том, что насос вращает дополнительный электродвигатель, получающий питание от генератора. Такая система работает не постоянно, а только в момент вращения колеса, что снижает расход топлива. Вероятность утечки жидкости ГУР и выхода из строя электрических блоков, разумеется, есть, но и преимущества налицо: энергоэффективность, сочетающаяся с информативностью и точностью управления.
Деление по принципу действия
Усилители могут быть адаптивными (также используется термин активный) и неадаптивными. Первые имеют переменный коэффициент усиления, который зависит от скорости машины: на малом ходу руль крутится легко, при наборе скорости рулевое колесо наливается тяжестью. Это сделано в целях безопасности, поскольку сильный и резкий поворот руля на скорости может привести к аварии. В конструкцию адаптивного усилителя руля входит дополнительный датчик скорости.
Как сберечь и продлить жизнь усилителю руля
Часто водители сами выводят из строя системы. Классический случай: попытка забраться на высокий бордюр с сильно вывернутыми колесами. Создается повышенное давление в гидравлической системе, что приводит к утечке. От повышенной нагрузки может выйти из строя электромотор. Эксперты ГК FAVORIT MOTORS не рекомендуют удерживать руль в крайнем положении более 4 секунд – опять же по причине возникновения избыточного давления.
В морозы перед стартом нужно слегка разогреть жидкость ГУР. Для этого достаточно пары-тройки вращений рулем. И, разумеется, нужно периодически проверять натяжение ремня привода насоса гидроусилителя, контролировать уровень рабочей жидкости в бачке, своевременно производить замену жидкости ГУР вместе с фильтром.
Как видите, большинство рекомендаций относится к гидравлическим или электрогидравлическим системам. Электрические усилители требуют меньшего ухода.
Механический усилитель руля

Сегодня часто возникают споры о преимуществах и недостатках разных видов усилителей рулевого управления — гидравлических (в т.ч. электрогидравлических) и электрических. Между тем, исторически существовал и третий тип — механический усилитель руля, приводившийся в действие непосредственно от вращаемого ремнём шкива, без посредства гидравлической жидкости или электричества. И нет, речь идёт вовсе не о рулевом колесе большого диаметра )) Что он из себя представлял, как работал и почему мы о нём больше не слышим — в этой статье.
В справочном порядке отмечу, что также существует ещё один тип усилителей руля — пневматические; они в основном применялись на грузовиках и троллейбусах с пневматическими тормозами.

Хотя у нас фирма Studebaker известна в первую очередь как производитель грузовиков, на самом деле основной продукции этой компании были легковушки, а армейские грузовики, вроде поставлявшейся по ленд-лизу модели US6— по сути побочным бизнесом. Именно на легковых автомобилях Studebaker 1953 модельного года и был использован механический усилитель руля, разработанный инженером Биллом Барнесом и изготовленный Warner Gear Company. Журнал Popular Science назвал его конструкцию «изумительно изобретательной» и прочил ему большое будущее. Но, обо всём по порядку…
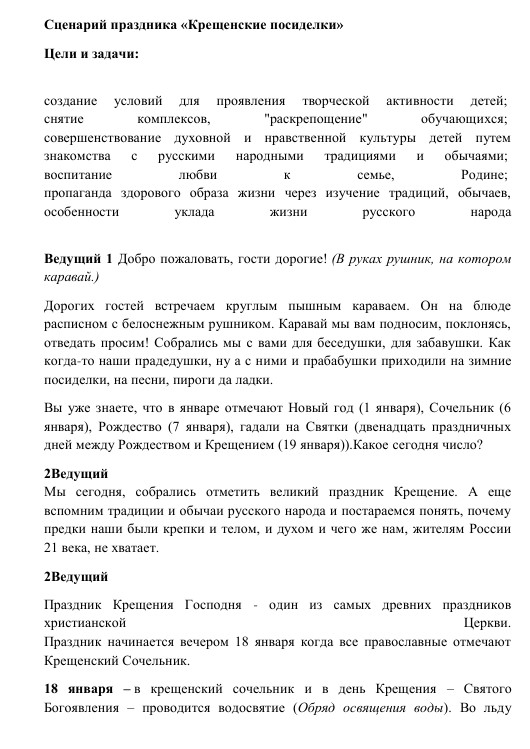
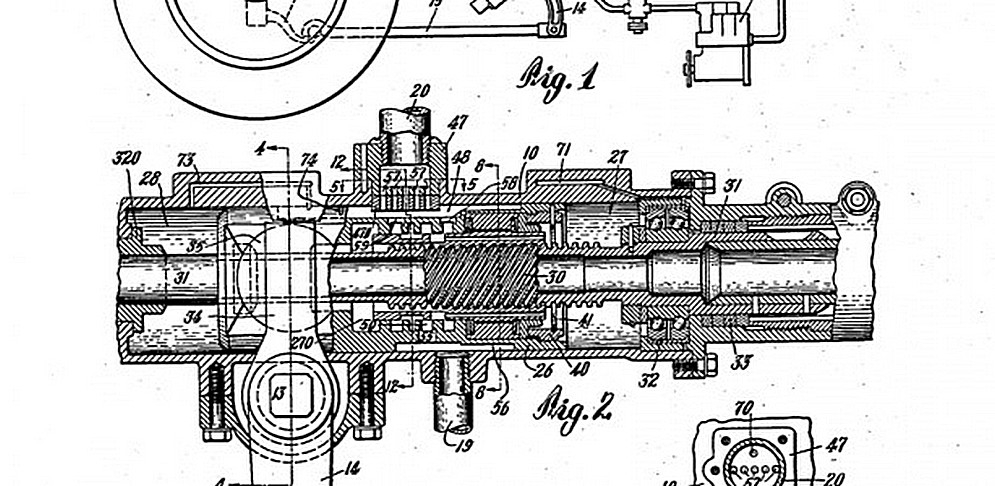
Усилитель был установлен на входном валу рулевого редуктора фирмы Ross типа «червяк — кривошип» с двумя шипами на роликах. Сам его механизм был чрезвычайно компактен — около 15 сантиметров в длину и столько же в диаметре — и весил всего лишь около 10 кг; правда, в это компактное пространстве было втиснуто множество изготовленных с высокой точностью деталей, что и обуславливало отношение к нему в те годы как к чуду точной механики. Его приводной вал получал вращение от коленчатого вала двигателя через пару приводных шкивов и соединяющий их ремень.

Механизм усилителя состоял из шестерёнчатого редуктора и двух многодисковых сцеплений. Ведущие диски каждого из сцеплений своими наружными выступами находились в постоянном зацеплении с кольцевыми шестернями, которые при заведённом двигателе через промежуточные цилиндрические шестерни (2) с общим передаточным числом 4:1 постоянно приводились во вращение от вала усилителя (1): верхняя (более близкая к рулевому колесу) кольцевая шестерня постоянно вращалась справа налево (против часовой стрелки), а нижняя — слева направо (по часовой стрелке). Ведомые же диски обоих сцеплений находились в постоянном зацеплении с зубчатой муфтой, связанной с валом рулевого редуктора. В результате сжатием и разжатием сцеплений можно было управлять тем, в каком направлении усилитель «помогал» водителю поворачивать руль за счёт передачи усилия с одной из шестерён на рулевой редуктор.
Вал усилителя бы связан с валом рулевой колонки через подпружиненную муфту (3), благодаря чему его поворот немного запаздывал относительно поворота рулевого колеса — небольшой конструктивный люфт уходил на сжатие кольцевой возвратной пружины муфты. На валу редуктора имелись спиральные канавки (4), в которых находились шарики, при помощи которых вал мог взаимодействовать с нажимной пластиной, управлявшей работой обоих сцеплений:
— При повороте рулевого колеса вправо шарики начинали смещаться в своих канавках вниз и толкали нажимную плиту сцепления в том же направлении. При этом нажимная плита сжимала диски нижнего сцепления и включала его, обеспечивая передачу усилия с вращающейся слева направо нижней кольцевой шестерни на вал рулевого редуктора.
— Соответственно, при повороте рулевого колеса влево происходило обратное: шарики толкали нажимную плиту вверх, она сжимала диски верхнего сцепления и на вал рулевого редуктора подавалось усилие с вращающейся справа налево верхней кольцевой шестерни.
При полностью сжатом сцеплении усилитель компенсировал 75% от необходимого для поворота управляемых колёс усилия. Как только водитель прекращал создавать усилие на руле, кольцевая пружина муфты возвращала её в исходное положение, сцепления разжимались и механизм усилителя разобщался с рулевым редуктором.
Также на шлицы рулевого вала выше муфты был надет стальной диск с наружной резьбой, которая при повороте руля взаимодействовала с ответной резьбой в корпусе усилителя, перемещая диск вдоль рулевого вала вперёд-назад. При этом имеющиеся на диске стопоры взаимодействовали с имеющимися на корпусе ограничителями и ограничивали число оборотов рулевого колеса между крайними положениями четырьмя.
При поломке усилителя (например, обрыве приводного ремня) или остановке двигателя срабатывал храповой механизм на приводном валу, что восстанавливало прямую механическую связь между рулевым валом и валом рулевого редуктора, позволяя водителю управлять автомобилем как на обычной машине без усилителя руля.
По отзывам тех лет (сводящимся, впрочем, к единственной по сути полурекламной статье в вышеупомянутом журнале), с точки зрения водителя работа механического усилителя ровным счётом ничем не отличалась от обычного гидравлического.
— По одним данным, была выпущена только опытная партия усилителей, которая поступила на испытания и не выдержала их, после чего о них забыли.
— По другим, механические усилители руля пошли в серию и даже устанавливались на самые первые товарные автомобили модели 1953 года (иногда называется количество проданных с ними машин: 40 штук), но по ним имелось такое количество нареканий со стороны покупателей, что фирма поспешила от них отказаться.
— Наконец, третья версия гласит, что по мере развёртывания производства выяснилось, что на самом деле такой усилитель намного сложнее и дороже в изготовлении, чем гидравлический, что и предопределило его судьбу.
В качестве недостатков также называется очень высокая шумность устройства, которую не удалось устранить в процессе его доработки, и низкая надёжность, а по слухам, ходившим на фирме в те годы, усилитель даже оказался потенциально небезопасен в использовании из-за возможности заклинивания одного из сцеплений, что привело бы к тому, что машина потеряла управление. Всей правды мы скорее всего уже никогда не узнаем за давностью лет.
В Интернете опубликован текст, который обычно представляется как выдержка из письма, полученного в июле 1979 года от Эрла Хэйли ( Earle Haley), в начале пятидесятых работавшего в отделе обслуживания фирмы «Студебекер», в ответ на запрос о механическом усилителе и его судьбе. Оно гласит (в моём переводе с английского, в квадратных скобках мои пояснения):
Аутентичность текста письма проверить невозможно.
Так или иначе, но на всех, или как минимум — практически всех, серийных «Студебекерах» модели 1953 года с усилителем руля этот усилитель был обычным гидравлическим. Причём в 1953 и 1954 годах использовался усилитель интегрированного типа фирмы Saginaw, а с 1955 — разработанный фирмой Bendix усилитель с установленным на рулевой трапеции отдельным силовым цилиндром (а-ля «Чайка» и ГАЗ-66), что позволило унифицировать рулевые механизмы на машинах с усилителем и без усилителя:

Хотя описание механического усилителя и правда имелось в руководствах по эксплуатации и ремонту автомобиля — что говорит о том, что если он и не пошёл в серию, то во всяком случае был к этому очень и очень близок.
Как видите — у американцев тоже далеко не все опытные разработки добирались до серии, а если и добирались — то отнюдь не всегда оказывались коммерчески успешными…
Усилитель рулевого управления: история регулятора ваших мышечных усилий

Усилитель рулевого управления был даже на самых простых телегах, ведь лошадь тянула поворотную ось за собой. С появлением «самодвижущихся» экипажей проблема усилия на рулевом управлении стала крайне актуальной, и началось соревнование конструкторской мысли длиной в добрую сотню лет.
Необходимость
Первые паровые омнибусы в полной мере познали все прелести непосредственного управления рулевыми колесами. Классические методы в виде «румпеля» большой длины и различных цепных и тросовых редукторов пришли из судостроения, но их применение на машинах сравнительно малого размера не всегда было возможно, и конструкторам приходилось искать обходные пути. Часто встречались машины, на которых рулевое колесо поворачивали сразу несколько человек. Но еще в 1823 году Роберт Гюрней использовал оригинальную конструкцию, которую можно считать первым усилителем рулевого управления.
В ней человек поворачивал управляющие колеса небольшой тележки, которая дышлом соединялась уже с основной поворотной осью, и если омнибус двигался и сцепления оси хватало, то маленькая тележка поворачивала основную ось за собой. Таким образом, с управлением мог справиться один человек. Наверное, это первый засвидетельствованный случай применения такого рода механизма на транспорте. Как ни странно, схемы с пневматическим (паровым) усилением получили очень малое распространение – судя по всему, ввиду общего консерватизма конструкций.
Усиление на скорости побольше
Более легкие машины с ДВС поначалу обходились более простыми румпелями, ведь их масса была во много раз меньше, чем у сухопутных паровозов, а значит, и усилия на управляемых колесах было намного меньше. Позиции рулевого управления без усиления заметно улучшились после появления круглого рулевого колеса на модели Panhard 4hp в 1894 году – оно позволяло обойтись достаточно простым механическим редуктором, и при этом иметь вполне комфортное усилие на руле. А то, что крутить его нужно было быстро и много – проблема не великая: машины тогда почти не водили любители, это было ремеслом суровых профессионалов, которые ездили почти без света и без отопления. Патент на новую форму рулевого колеса оформил на себя Альфред Вашерон, и с 1898 года все машины марки Panhard имели круглый руль, а вскоре за ними последовали и остальные автопроизводители.
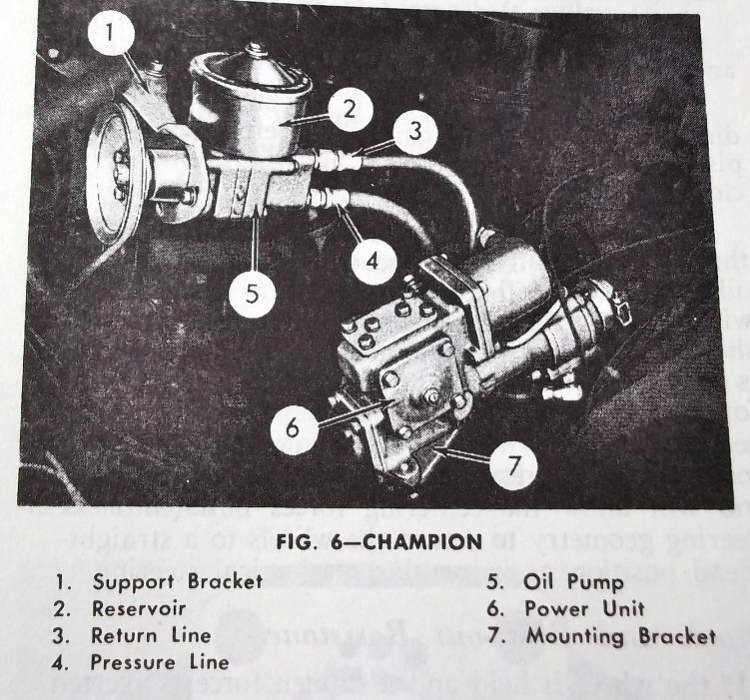
Но над проблемой усиления рулевого управления по-прежнему работали: например, в 1876 году Г.В. Фиттс запатентовал свою систему усиления рулевого управления, основанную на сложном механизме дифференциального механического усилителя с приводом через сцепление от мотора (US Patent: 175,601), но такая система так и не была реализована.
За ней последовали разработки Роберта Тьюфорда из Питтсбурга, который запатентовал свою систему в 1900 году (U.S. Patent: 646,477), и Фредерика Ланчестера, запатентовавшего гидравлический и вакуумный усилители рулевого управления в Англии в 1902-м.
Первые реальные попытки
Но эти разработки не были использованы в конструкции усилителя грузовика Columbia 1903 года выпуска – он был оснащен… электроусилителем рулевого управления! Так что если вы думаете, что электроусилитель появился недавно, то ошибаетесь – исторически он оказался первым реально работающим типом усилителя.
В период 1904-1927 гг. некоторые грузовые машины оснащались вакуумными и пневматическими усилителями рулевого управления. Точность такой конструкции оставалась низкой, но на грузовиках и тракторах она иногда применялась, поскольку скорости у них были невелики, а масса машин, тем не менее, заметно возросла. Связано это, в первую очередь, с простотой управления вакуумной системой. Более ранние патенты уже описывали устройство клапана-распределителя, регулирующего подачу жидкости или газа при отклонении рулевого колеса, а разрежение можно было брать прямо с впускного коллектора двигателя. Пневматические же системы на сжатом воздухе тоже встречались на машинах, где сжатый воздух использовали для привода тормозов и вспомогательных механизмов.
Талант и настойчивость – появление ГУР
Как и в случае с редукторами, гидравлические системы управления рулем появились в первую очередь на судах, и на протяжении Первой мировой войны не прекращались попытки применить нечто подобное на тяжелых колесных броневиках, тягачах и грузовых машинах. Но успех сопутствовал Фрэнсису Дэвису и его менее известному компаньону Джорджу Джессопу, усилия которых получили наибольшее признание. К моменту создания работающей схемы ГУР Фрэнсис был уже весьма опытным инженером: он закончил Гарвард в 1906 году и до 1922 года работал в подразделении грузовых автомобилей Pierce Arrow. Решая задачу упрощения гидравлики, он впервые отказался от систем, аккумулирующих давление жидкости и перешел на привод с постоянно работающим насосом, и к схеме с постоянно открытыми регулирующими клапанами. Это снизило давление, уменьшило число компонентов системы и тем самым усовершенствовало гидравлическую систему усиления до уровня, позволяющего начать ее серийное производство и устанавливать ее даже на скоростные машины. Инженер доверял своему детищу: он установил первый ГУР собственного производства на свой личный автомобиль Pierce-Arrow Roadster в 1925 году и доказал, что машиной стало не просто легче управлять. Гидравлика решала еще одну проблему – амортизировала вибрации от колес, передававшиеся на руль, и этим выгодно отличалась от любых систем, основанных на вакуумном или пневматическом приводе.
Не зря первой компанией, заинтересовавшейся в устройстве, стал именно Cadillac – ведь шестнадцатицилиндровые монстры не только ездили быстро, они еще и были очень тяжелыми. В 1934 году Дэвис стал работать на General Motors. Однако ввиду большой стоимости тонкой гидравлики и экономического кризиса, вызвавшего падение продаж автомобилей, гидроусилитель не стал частью стандартной комплектации автомобилей GM, а конструктор уже в 1936 ушел в компанию Bendix и там продолжал совершенствовать свою систему.
К 1939 году были разработаны системы гидроусиления дести типов, и две из них проданы корпорации GM для экспериментальной установки на автомобилях Buick. В 1940 году они были вновь востребованы на бронеавтомобилях Chevrolet, и в результате к концу войны более 10 тысяч машин были оснащены ими, а конструкция была действительно отлажена для массового производства.
После войны корпорация Chrysler начала разработку своего собственного усилителя на базе уже просроченного патента Дэвиса. Разработка была показана на модели Crysler Imperial, и получила название Hydraguide в 1951 году. Сразу после этого компания GM заключила сделку с Дэвисом об использовании его разработок на машинах ее марок, и к 1953 году по дорогам уже бегал первый миллион машин с гидроусилителями руля. Пожалуй, это тот случай, когда конкуренция безусловно полезна – к 1956 году каждый четвертый продававшийся в США автомобиль имел гидроусилитель, что неудивительно, учитывая рост массы и мощности.
А вот в Европе дела продвигались не так хорошо. Например, компания Цанрадфабрик, более известная как ZF, выпускала простые рулевые редукторы без гидроусилителей для машин с нагрузкой на ось до 6,5 тонн, а значит, даже водители тяжелых грузовиков тогда обходились без «помощников». Ситуация начала меняться только в середине шестидесятых, когда увеличение требований к труду водителей грузовиков привело к появлению спроса на системы гидроусиления. А вот на легковых машинах водители справлялись в основном своими силами вплоть до восьмидесятых годов, когда рост снаряженной массы машин, их скоростей, требований к безопасности и переход на передний привод, а значит и рост массы, приходящейся на переднюю ось, привели к необходимости внедрения усилителей рулевого управления даже на малолитражках.
Особенности конструкции
Конструкция гидроусилителя, предложенная Дэвисом, оказалась настолько удачной, что, по большому счету, мало изменилась до нашего времени.
Суть идеи Фрэнсиса Дэвиса состояла в том, что поток масла от насоса идет постоянно, а не только тогда, когда требуется создать давление. При повороте руля начинает скручиваться торсионный стержень, связывающий вал рулевой колонки и редуктор рулевого управления. При этом в золотниковом распределительном механизме открываются отверстия, направляющие жидкость от насоса в правый или левый рабочий цилиндр гидроусилителя. Чем больше закручивание торсиона, тем больше отверстий золотника открывается, и тем больше насос помогает вращать руль. Основные усилия в совершенствовании этой простой схемы были направлены на уменьшение потерь в системе привода, составляющих не менее 90 ватт даже на самых современных системах, обеспечение более комфортного регулирования усилия на руле, увеличение степени помощи при маневрировании на малой скорости и «утяжеление» руля на трассе.
Дальнейшие усовершенствования
Уменьшение затрат на привод шло по пути совершенствования гидравлики, насоса и его привода. Типичные затраты на привод – это потери на работу передачи, например, ремня (около 10 ватт), потери в насосе (для самых совершенных систем это 40 ватт в простое) и потери в распределительном механизме (это еще 20 ватт). Более ранние системы потребляли заметно большую мощность – так, отчет об испытаниях большого мотора V8 компании GM говорит о почти 500 ваттах потерь мощности при установке на мотор насоса гидроусилителя. Можете себе представить, каков был размер проблемы при использовании не вполне исправных или менее совершенных компонентов.
Для снижения затрат на привод насоса ГУР, когда усиление не требуется, и, собственно, регулирования степени усиления рулевого привода в первую очередь начали совершенствовать насос. Первые системы насосов переменной производительности пришли из систем гидропривода и оказались излишне сложными для массового применения на легковых машинах, но иногда встречаются на грузовиках. Конструкции могут быть различными – лопастными, радиально- или аксиально-поршневыми, но их все объединяет сложность и редкость, поэтому они не устанавливались на легковые машины ввиду большой массы, размеров и цены. Компактным вариантом такой конструкции является, например, насос ГУР Subaru, где шиберный насос имеет внешнее кольцо, которое может менять свое положение относительно центра ротора.
Тем самым уменьшается производительность и снижается нагрузка при необходимости. Недостатки такого решения знают все владельцы таких машин – если «обычный» насос работает десятки лет, то такая конструкция не только требует регулярной замены масла более высокого качества, но и часто имеет ресурс меньше пяти-шести лет. Из достоинств – отличное реактивное действие на руле на любой скорости и уменьшение затрат на привод.
Альтернативой этому решению стал электрический привод насоса ГУР, и в таком виде система устанавливалась на очень популярные у нас машины – например, Ford Focus II и Opel Vectra C. Впервые же такая система тоже была применена на машине марки Subaru: в 1988 году вышел Subaru XT6 с системой Cybrid. В Европе же первопроходцем стала «особо экономичная» версия популярного Golf 3 Ecomatic. Впрочем, в отличие от Subaru, машина не стала массовой, хотя она одна из первых была оснащена роботизированным приводом сцепления, системой старт-стоп и претендовала на звание «трехлитрового автомобиля» – популярной в середине девяностых идеи машины с расходом топлива в 3 литра на сто километров. Кстати, это один из самых редких вариантов Гольфа – их выпустили всего 4 тысячи штук.
Тем не менее, широкого распространения схема с электроприводом насоса не получила из-за сложности и высокой цены, хотя была заметно прогрессивнее схемы с насосом регулируемой производительности, например, позволяя снизить усиление до нуля, полностью исключить затраты на привод ГУР, когда он не нужен, а заодно использовать усилитель даже при заглохшем моторе.
Любопытную систему предложила компания ZF в 1989 году. Система Servotronic позволяла регулировать степень усиления рулевого управления при использовании обычного насоса с постоянной производительностью. В этом случае усовершенствовали золотниковый клапан рулевого управления, сечение каналов подачи жидкости регулировалось дополнительным поршнем, приводимым в действие электродвигателем по командам блока управления. Конечно, при этом не уменьшались потери мощности на привод системы, но зато рулевое управление можно было настроить очень точно. Такие системы применялись на некоторых европейских машинах премиум-класса (например, на BMW 850i) до 2001 года, когда производство систем свернули, выпустив более 12 млн штук.
В целом, историю собственно гидроусилителя можно на этом закончить – классическая конструкция применяется в одном из этих вариантов до сих пор и, вероятно, уже не изменится. Ее понемногу вытесняет электроусилитель, несомненно более прогрессивный, хоть и появившийся первым. Кстати, история вообще любит возвращения – например, «новейшие» электромобили были доминирующим видом транспорта в короткий период 19 века. Тогда они победили «паровички» и «поспели» раньше машин с более автономным ДВС, и порог скорости в 100км/ч впервые перешли именно на электромобиле.
От гидравлики к электрике
Электроусилитель исторически оказался первой системой такого рода и, похоже, вытеснит все остальные схемы усилителей рулевого управления в ближайшее время, если, конечно, его не сменит система управления drive-by-wire, о которой я расскажу чуть ниже. Установить мощный электромотор на рулевую колонку или непосредственно на рулевой механизм, а вместо золотникового распределителя на торсион рулевой колонки поставить обычный потенциометр оказалось настолько простой идеей, что примерно в таком виде это и было реализовано на грузовике в 1903 году. Но в те годы развитие электросистем сильно отставало от гидравлики и пневматики, надежность была низкой, да и генераторы появились на машинах на десять лет позже, так что первый электроусилитель питался, судя по всему, от аккумуляторов.
Новый технологический виток позволил применить полностью электрический привод рулевого управления без гидравлики на небольшой машинке Suzuki Cervo третьего поколения в 1988 году. Патент на систему был взят компанией Mitsibishi в том же 1988 году и предусматривал установку двигателя усилителя непосредственно на рулевую рейку.
Дальнейшее развитие таких систем пошло по пути увеличения мощности и надежности электрической части. Поначалу серьезной проблемой оказался перегрев электродвигателя при простой системе управления усилением. Но вскоре проблему решили за счет увеличения мощности компонентов, подбора оптимального типа двигателей и совершенствования алгоритмов усиления. Сейчас электрические усилители устанавливают не только на малолитражки, но и на крупные внедорожники, и проблемы с надежностью уже в прошлом. По сути, электроусилители надежнее классических гидросистем и к тому же позволяют куда лучше настраивать управляемость машины. Кроме того, без электроусилителя немыслимы системы самопарковки и автоматически управляемые машины.
С механической точки зрения мало что поменялось – изначальная схема с установкой мотора усилителя на рулевую рейку уже к запуску в производство претерпела изменения, и вся система устанавливалась непосредственно на вал рулевой колонки. В дальнейшем компания VW совместно с ZF разработала более совершенную схему, с расположением электродвигателя привода непосредственно на рулевой рейке и передачей усилия с помощью зубчатого ремня, что разгрузило рулевое управление от паразитных вибраций и сделало его настройку комфортнее для водителя. Сейчас большинство выпускающихся систем имеет подобную компоновку. Впрочем, развитие ЭУР продолжается и используются все варианты, и возможно появление новых и куда более оригинальных конструкций в ближайшем будущем – например, уже представлены варианты с линейным мотором привода рейки.
Совершенно без связи
Рассказ об усилителях рулевого управления будет неполным, если не упомянуть еще два интересных рулевых механизма, которые на самом деле «усилителями» в полном смысле слова не являются. Это именно сервоприводы рулевого управления, в которых механической связи рулевого колеса и рулевого механизма нет вовсе. Один из механизмов родом из 70-х годов и устанавливался на легендарный Citroen CX с 1974 по 1991 год, а второй совсем молод, презентован буквально в прошлом году на Infiniti Q50S и называется DAS. Разумеется, их названия являются аббревиатурами от французского Direction à rappel asservi и английского Direct Adaptive Steering. Не знающим французского подскажу: первая фраза переводится как «рулевое управление с контролируемым возвратом».
Французская система обязана своим появлением на свет уникальной гидропневматической подвеске колес и применяемым в ней технологиях. В машинах с такой системой установлен гидронасос, создающий давление, но не прокачивающий через себя много жидкости, а значит, не подходящий для работы обычного «классического» ГУР. Зато у него большое давление, и в системе используются гидроаккумуляторы, а значит, можно отбросить все наработки Ф. Дэвиса по упрощению системы и создать сервоуправление по образцу корабельного или самолетного, где руль почти не связан с рулевым механизмом и лишь управляет системой клапанов. Впрочем, в Ситроене при отсутствии давления связь все же появляется, только люфт в четверть оборота руля не позволяет использовать систему иначе как в аварийной ситуации. А когда все работает, колеса точно следуют повороту руля, на который не проходят ни удары, ни вибрации от колес и который сам стремится вернуться в нулевое положение
Усилие на руле при этом создается в зависимости от скорости движения машины специальной системой с электронным управлением и гидроприводом. Помимо сложности такая система еще и полностью лишает водителя обратной связи с дорогой, так что минусов у нее хватало. Зато ее ценили за комфорт – можно ехать хоть на трех колесах, все равно машина будет двигаться прямо. Разумеется, развития система не получила, устанавливалась она только на наследника модели – Citroen XM. Но зато в 2014 году идея получила достойное продолжение.
Об Infiniti вы, наверное, все уже знаете от нас же – тут начинка другая, полностью электронная, усилие на руле полностью искусственное, но точное. Машина сама умеет исправлять ошибки водителя и, конечно же, тоже не передает на руль «лишние» вибрации и шум. О достоинствах и недостатках можно дискутировать, но пока это тоже лишь дорогая игрушка, и до массового применения далеко, однако технология определенно заслуживает внимания.
Вместо заключения
К сожалению, за кадром остались такие интересные вещи, как полноуправляемые шасси и адаптивные рулевые механизмы с гидро- и электроприводом, но этим темам мы обещаем посвятить отдельные полноценные материалы.