Робот-пылесосы c умной навигацией и построением карты.
Ещё несколько лет назад хаотичное движение робота считалось нормой, а планирование маршрута было признаком роскоши, при выборе пылесоса основное внимание уделяли его техническим характеристикам: мощности мотора, объему пылесборника, типу аккумулятора. Но есть ли смысл в крутых технических показателях, если половину комнаты робот просто оставлял не убранной? Поэтому в 2020 году даже самые дешевые модели оснащены инструментами для картографии и умной уборки.
Критерии выбора
Ключевым критерием попадания в рейтинг роботов с умной навигацией стала сложность алгоритма уборки – сколько факторов робот учитывает при составлении маршрута, умеет ли адаптироваться к особенностям помещения и расстановке препятствий. Принципиальное значение имеет уровень интерактивности карты: можно ли делить помещение на комнаты, ставить запретные зоны, отмечать целевые участки, рисовать виртуальные стены. Но качественная навигация имеет значение только при качественной системе уборки, поэтому при ранжировании я учитывал и общие характеристики робота-пылесоса: силу всасывания, набор аксессуаров для влажной и сухой уборки, ёмкость аккумулятора.
Roborock S6 MaxV

Roborock S6 MaxV – робот нового поколения с технологией распознавания предметов ReactiveAI. В его бампер встроена стереоскопическая камера, которая по очертаниям объектов определяет, что именно находится на маршруте следования: стул, сумка, носки, собачья миска и т.д. Для каждого типа предметов в базе робота имеется специальный алгоритм работы. ReactiveAI, с одной стороны, снижает количество коллизий вроде запутывания в проводах или растаскивания по полу экскрементов, а с другой стороны, ускоряет процесс уборки. Для составления карты помещения служит лидар. В остальных технических аспектах Roborock S6 MaxV также демонстрирует высокий класс: сухая уборка выполняется при помощи мотора на 2500 Па и двух щеток, влажная – при помощи резервуара на 300 мл и съемной швабры.
Ecovacs Deebot Ozmo T8 Aivi

Deebot Ozmo T8 Aivi – это единственный конкурент S6 MaxV. Навигационные системы у этих моделей идентичные: фронтальная камера распознает предметы, а лидар определяет координаты препятствий для картографии. А вот в функциональном плане есть существенные различия. Двигатель у Deebot слабее – всего 1500 Па, зато под днищем имеется дополнительная торцевая щетка, значительно повышающая эффективность уборки за один проход. Второе важное отличие – влажная уборка. В комплекте Deebot Ozmo T8 Aivi есть два дополнительных модуля: стандартный модуль с баком и площадкой для микрофибры и модуль с виброшваброй для оттирки пятен. Благодаря встроенному эксцентрику виброшвабра совершает возвратно-поступательные движения, очищая присохшую к полу грязь и убирая разводы.
GENIO LASER L800

GENIO LASER L800 сочетает в себе лучшие достижения навигации старого поколения (без распознавания предметов). Встроенный гироскоп определяет положение робота в пространстве, а лидар отмечает на карте точные координаты объектов. О приближении к препятствию робота предупреждают ИК-датчики, на случай столкновения предусмотрен тактильный датчик. В отличие от многих конкурентов, GENIO LASER L800 укомплектован TOF-сенсором, поэтому с уборкой по периметру робот справляется быстро и качественно. Уровень интерактивности карты максимальный: можно не только обводить прямоугольные зоны и ставить стены, но и разграничивать комнаты, а затем одним нажатием пальца отправлять GENIO на уборку в кухне или в спальне. Аккумулятора в 5200 мАч хватает для обработки больших квартир со сложной планировкой.
Сравнение навигации роботов-пылесосов: лидар против камеры



Приветствую всех читателей сайта Роботобзор! В пределах этой статьи мы сравним два самых точных типа навигации роботов-пылесосов: на базе лидара и на базе камеры. Такой навигацией оснащены в большей степени модели среднего и премиального ценового сегмента. Это связано с высокой стоимостью самих датчиков. Некоторые бренды используют исключительно камеру в своих флагманских моделях, а некоторые исключительно лидар. Сейчас мы как раз и проведем сравнение, испытав навигационную систему топовых iRobot Roomba i7+ и Roborock S5 Max. Итак, давайте же разберемся, что лучше: лидар или камера для навигации.
Кратко о навигации
Для начала вкратце рассмотрим, что собой представляет точная навигация на базе лидара и камеры, и какие особенности у этих двух систем.
Лидар в роботах-пылесосах устанавливается сверху на корпусе. Он представляет собой некую «башенку» с вращающимся лазерным дальномером внутри. Или как его еще называют, LDS датчик.

Этот лазерный дальномер вращается на 360 градусов с высокой скоростью, сканируя объекты вокруг себя, рассчитывая расстояние до них и выстраивая точную карту помещения.

Робот-пылесос с лидаром
Особенности лидара – это одинаковая точность навигации при любом уровне освещения, т.е. как днем, так и ночью. Кроме этого технология лазерного сканирования более точная. К недостаткам относят более частый выход из строя лидара из-за наличия вращающегося механизма, а также проблемы со сканированием зеркальных покрытий. Это могут быть зеркальные дверцы шкафов в комнате или хромированные ножки стульев. Кроме этого чаще всего роботы-пылесосы с лидаром по высоте достигают 10 см из-за этой самой башенки сверху, а соответственно проходимость роботов под мебелью уступает плоским моделям.
В свою очередь камера представляет собой визуальную систему навигации. Карта помещения строится за счет считывания и обработки изображений с камеры. Она сканирует потолок, делая множество изображений, и на основании этих данных строит план комнат.

Навигация на базе камеры более надежна в плане долговечности самой этой камеры и немного ниже по себестоимости. Кроме этого, камера не увеличивает высоту робота-пылесоса и есть модели, высотой всего около 7-8 см, что позволяет роботу проходить под низкой мебелью.

Навигация по камере
Недостатки визуальной навигации: при плохом уровне освещении или в слабоосвещенных местах камера простыми словами «слепнет». Да и точность визуальной навигации в любом случае уступает лазерному сканированию. Особенно, если потолок без ключевых визуальных меток, по которым и ориентируется робот.
Далее мы в одинаковых реальных условиях сравним лидар и камеру и посмотрим, с каким типом навигации роботы-пылесосы лучше выполняют свою работу.
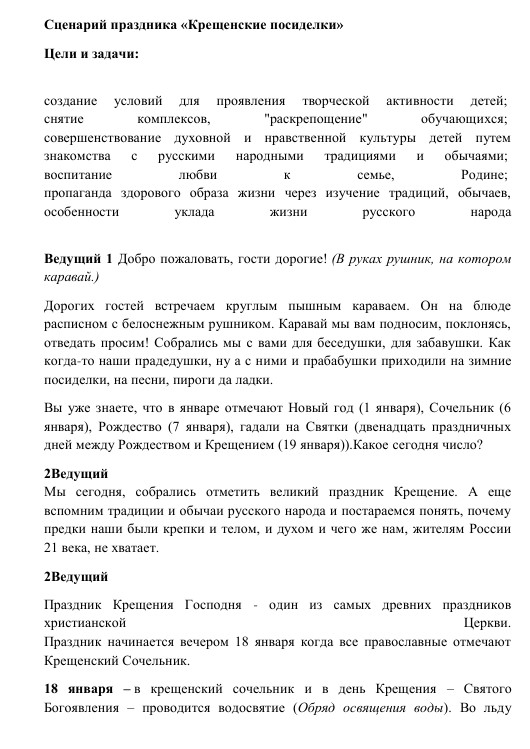
Сравнение №1 – Ознакомительный проезд


Для того, чтобы максимально объективно протестировать навигацию роботов, мы создали несколько препятствий в тестовой комнате, а именно:
Препятствия в комнате
Сам тест показан на видео, рекомендуем его посмотреть:
В итоге получилось, что:
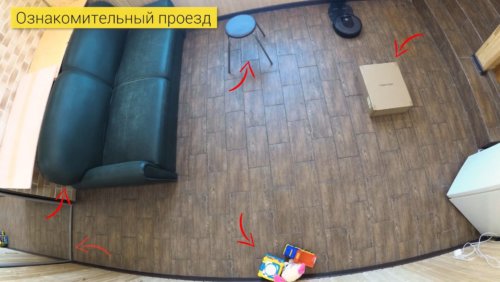
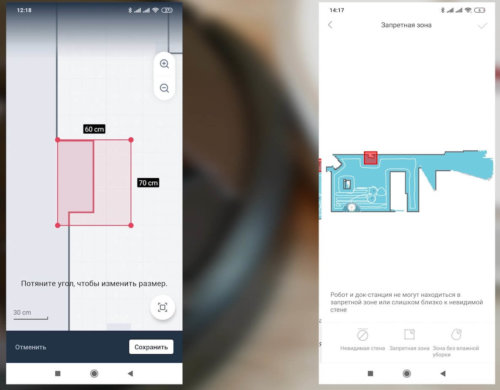
Сравнение №2 – Передвижение при сохраненной карте
Теперь посмотрим, насколько изменится алгоритм передвижения роботов после того, как они построили карту помещения и сохранили ее в памяти. Дополнительно открылась возможность устанавливать запретные зоны на карте, мы добавим по одной зоне, проверив как роботы на них реагируют. Наглядно все показано на видео (выше).
iRobot Roomba i7+ убирает змейкой зону за зоной. Вокруг ножек стульев он не убрал, в темной области проблем с навигацией не было, запретную зону распознал и не заехал в нее. На уборку в один проход потребовалось около 12 минут.
Что касается Roborock S5 Max, алгоритм движения поменялся. Робот первым делом проехал всю доступную площадь по периметру, а потом начал убирать продольной змейкой за один проход. Он убрал вокруг всех ножек стула, практически не касался препятствий и обходил стороной запретную зону. Еще одно наблюдение – iRobot Roomba i7+ за диваном проехал только туда и обратно, а Roborock S5 Max смог сделать два прохода туда и обратно в пределах этой же ширины зоны, т.е. он более тщательно убрал в узкой области. После этого робот пошел на второй проход всей доступной площади и вернулся на базу. Потратил чуть больше 18 минут, но опять-таки, покрыл бОльшую доступную площадь.
Передвижение робота при сохраненной карте
Сравнение №3 – Ориентация в многокомнатном помещении

Ну и последнее, что хотелось бы сравнить – как роботы-пылесосы на базе лидара и камеры строят карту всего дома и за сколько времени они убирают эту площадь. В нашем случае это 5 комнат общей площадью около 40 кв.м. Полезная площадь уборки около 35 к.в.м
Камера Айробота вычислила 27 кв.м, хотя по факту около 35 квадратов. Однако точность построения высокая, геометрия совпадает с реальной обстановкой в доме. Эту площадь робот в один проход убирает примерно за 50-55 минут, останавливаясь на особо загрязненных участках, которые сам определяет оптическим датчиком.
Лидар у Roborock построил такую же по геометрии комнату, при этом площадь вычислил более точно, 34 кв.м. что практически соответствует реальной. Кроме этого на уборку всей доступной площади ему понадобилось всего 31 минута, что значительно быстрее.
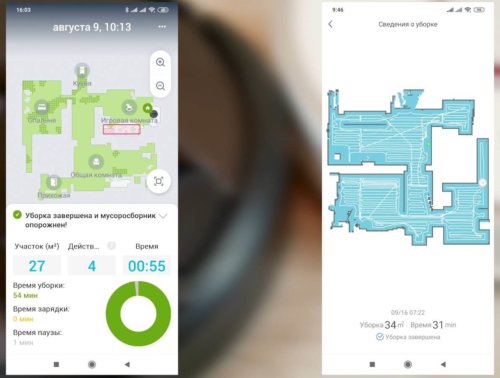
Ориентация роботов в многокомнатном помещении
В итоге можно сказать, что лидар точнее строит карту и позволяет быстрее пройти всю доступную площадь, если комнат несколько. При этом робот с лидаром в нашем случае тщательнее прошел в проблематичных местах, таких как область между ножками стула и узкий затемненный участок за диваном. И контакт с предметами у роботов с лидаром более мягкий, они реже ударяются бампером.
Кстати, важно заметить, что после нескольких проездов роботом с камерой, особенно если вы его будете включать в разное время суток при разном уровне освещения в комнатах, схема передвижения выработается автоматически и даже ночью робот сможет проезжать всю доступную площадь, не оставляя не убранных зон. Так что именно iRobot Roomba i7+ может столкнуться с проблемой в навигации в слабоосвещенных местах только при ознакомительном проезде. В дальнейшем эта проблема исчезает.
Подводим итог
В завершении выделим особенности роботов-пылесосов с точной навигацией на базе лидара и камеры.
В любом случае и тот, и другой тип навигации позволяет построить точную карту помещения и вывести уборку роботом на максимально эффективный уровень. Сравниваемые роботы могут сохранять несколько разных карт уборки в памяти, что актуально для двухэтажных домов, кроме этого поддерживается уборка после дозарядки, зонирование помещение на комнаты для покомнатной уборки по графику, а также возможность установки запретных зон и зон уборки на карте.
При этом всем лидар строит карту точнее, поэтому убирает быстрее и оставляет минимум пропущенных зон. Как вы убедились, критической проблемы при работе с зеркалом нет. В любом случае есть способы избежать построения карты с погрешностью, например, наклеить на зеркале на уровне лидара какую-нибудь защитную пленку, которая не будет отражать невидимые глазу инфракрасные лучи датчика.
Что касается долговечности самого лазерного дальномера, качественные роботы, те же Roborock, оснащены надежным лидаром, поэтому и прослужит такой робот долго. А вот за китайские неизвестные роботы никто не отвечает и в этом случае есть шанс, что навигация может выйти из строя быстрее. Ну и не забываем про высоту, тонких роботов с лидаром не бывает, поэтому это, наверное, единственный весомый минус, который может быть.
Камера слегка уступает точностью построения карты, особенно это чувствуется на больших площадях от 100 кв.м. и выше. Да и скорость уборки ниже у таких роботов. Но зато камера реже выходит из строя и не ворует высоту робота. А проблемы с ориентацией при слабом освещении могут наблюдаться либо при ознакомительном проходе, либо в тех моделях, у которых камера больше выступает муляжом, чем реальным органом навигации.
Так что я бы сказал, что роботы-пылесосы с лидаром лучше в плане навигации, но не настолько, чтобы вовсе не рассматривать модели с камерой. Все индивидуально и большей мере зависит от самого выбранного робота-пылесоса.
В любом случае, в 2020 году, самый лучший тип навигации, это установленные лидар и камера одновременно. Сравнение лидара и лидара+камеры вы можете увидеть на нашем видео:
Какая навигация лучше для робота-пылесоса

Навигационная система является неотъемлемой частью робота-пылесоса, ведь именно благодаря ей девайс может ориентироваться в пространстве, качественно убирать и составлять оптимальный маршрут, не застревать на одном месте. В статье разберемся с основными типами навигации роботов-пылесосов и какая из них лучше.
Разновидности навигации умных пылесосов
У каждой навигационной системы есть свои плюсы и минусы, а также отличия по точности.
С лидаром
Под лидаром понимается башенка с прорезями на верхней части робота-пылесоса, присущая устройствам с лазерной навигацией. Такое оснащение позволяет девайсу точно ориентироваться в пространстве даже в темноте, строить карту помещения с высокой точностью. Благодаря вращению излучателей внутри башни, происходит определение точного расстояния до расположенных поблизости предметов и оценка своего местонахождения. По полученным данным строится маршрут, и создается план дома.

Плюсы роботов-пылесосов с лазерным дальномером:
В рейтинге роботов-пылесосов с лазерной навигацией можно выделить такие модели:
С камерой
Последней разработкой в ориентировании умных девайсов в пространстве являются роботы-пылесосы с камерой навигации. Встраивается камера сверху гаджета и помогает устройству видеть стены, потолок, разные предметы. Особенность такой системы состоит в очень точном построении плана жилья.

Преимущества роботизированных пылесосов с камерой:
Среди моделей с камерой можно отметить:
С гироскопом
Чтобы разобраться, что такое гиронавигация в роботе-пылесосе, нужно рассмотреть саму технологию. В основе лежит замер угловой скорости девайса, на основе чего определяется его местоположение и направление движения. Устройство запоминает, откуда приехало и куда ему нужно переместиться.

Плюсы такого типа навигации:
Выяснив, что представляет собой гироскопическая навигация для робота-пылесоса, стоит выделить лучшие модели с таким оснащением:
Подводя итог, можно сказать так, что все перечисленные системы ориентирования являются современными и имеют высокую точность. Однако специалисты утверждают, что для робота-пылесоса лучшей системой навигации является сочетание лидара и фронтальной камеры.
Как работают сенсоры роботов-пылесосов


Содержание
Содержание
Наблюдение за работой робота-пылесоса — довольно медитативное и умиротворяющее занятие. Но время от времени у пытливых умов появляется вопрос: «Как роботу удается ориентироваться в пространстве и преодолевать возникающие на его пути препятствия?» Давайте разбираться!
Несмотря на огромное количество мифов о работе робота-пылесоса, этот девайс по праву занимает свое место в наших домах, а все благодаря той легкости и скорости, с которой он выполняет уборку. Его эффективность во многом зависит от количества и типа электронных сенсоров, установленных на борту. В зависимости от модели, робот-пылесос использует от 6 до 15 датчиков, включенных в различные системы.
Назначение датчиков — построение карты объекта, ориентирование в пространстве и обеспечение безопасности девайса. Данные, получаемые с сенсоров, обрабатывает управляющая программа. Ориентируясь на полученные значения параметров, применяются те или иные сценарии, непосредственно влияющие на действия робота-уборщика.
Только слаженная работа всех систем обеспечивает работу пылесоса.
Система позиционирования
Основная система любого робота-пылесоса, отвечающая за построение карты убираемой территории и определение точного местоположения электронного уборщика внутри помещения.

В основе работы системы лежит метод SLAM (Simultaneous Localization And Mapping), основная идея которого — построение ситуационной карты и локализация объекта в пространстве. Это происходит следующим образом. Сканер, установленный на объекте, проверяет пространство вокруг и по отклику своих датчиков составляет карту местности.
В сегмент бытовой техники изобретение пришло из области освоения космоса и близлежащих планет: одними из первых такие радары (точнее, лидары) получили луноходы и марсоходы.
В роботах-пылесосах построение карты необходимо для определения оптимального алгоритма уборки. После составления карты управляющая программа разрабатывает и отдает на исполнение оптимальный маршрут передвижения робота. Мобильный пылесос должен заглянуть даже в самый отдаленный уголок!
В современных роботах-пылесосах построение карты окружающего пространства производят одним из двух типов датчиков.
Лазерное сканирование пространства
Сканирование пространства происходит с помощью лидара (или, как его еще называют, LDS-датчика) — прибора, применяемого для точных измерений в газообразной среде. Распознать LDS-датчик достаточно просто: он представляет собой небольшой выступ в форме шайбы, расположенный на верхней плоскости девайса. Датчик содержит источник и приемник лазерного или светового луча (в маломощных девайсах применяют светодиоды, излучающие потоки света в инфракрасном диапазоне). Для обеспечения кругового обзора LDS-сенсор вращается вокруг своей оси с довольно высокой частотой.

Испускаемый световой луч, встречаясь с препятствиями на своем пути (стены, крупная мебель и т. д.), отражается от них и улавливается приемником лидара. Расстояние до препятствия вычисляется по временной задержке между генерацией и приемом лазерного луча. В большинстве моделей роботов-пылесосов частота вращения датчика, как правило, составляет 5 об/сек, чего вполне достаточно для построения карты и довольно точного вычисления положения пылесоса в помещении.

Работающие по такому же принципу датчики можно встретить и на прототипах беспилотных автомобилей.

LDS-датчик позволяет достаточно точно определять расстояние до стен, крупных предметов и других препятствий. Как правило, в роботах-пылесосах применяются датчики, позволяющие уверенно сканировать пространство на расстоянии до 6 метров.
Основным недостатком такой конструкции является то, что датчик выступает над уровнем верхней плоскости, и добавляет к высоте робота-пылесоса несколько сантиметров. В некоторых случаях это может быть критично, поскольку пылесос просто физически не сможет заехать под низко расположенную полку или пространство под кроватью или шкафом.
Визуальная система навигации
Другим способом навигации является так называемая безлидарная система, основанная на широкоугольной камере.

Вот только камера применяется особая, позволяющая создавать объемные снимки пространства. Иначе такие камеры называют «камерами глубины» или ToF-камерами (Time of Flight, что в буквальном переводе означает «время полета»).
ToF-камеры — новое веяние в сфере мобильных гаджетов. Ими оснащены многие флагманские смартфоны. С помощью такой камеры легко и довольно недорого реализуется механизм распознавания по лицу, обмануть его фотографией человека невозможно.
ToF-камера представляет собой источник света, излучающий в инфракрасном спектре, и светочувствительную матрицу, улавливающую интенсивность отраженного света. Их принцип действия схож с лазерным определением расстояния. Камера рассчитывает время с момента испускания пучка света до момента его фиксации на светочувствительной матрице, вычисляет расстояние до объекта в соответствии с временной задержкой и составляет объемную карту помещения.

Преимуществ у такого метода несколько. Во-первых, уровень освещения не играет определяющей роли. Даже в полумраке сенсору по силам «отрисовать» границы убираемого пространства. Во-вторых, камеру встраивают вровень с верхней поверхностью робота, что позволяет сделать его более компактным, и, следовательно, открыть ему дорогу в труднодоступные места.
Система ориентирования в пространстве
Задача системы ориентирования — минимизация столкновений с препятствиями, возникающими на пути робота-пылесоса.
В отличие от системы позиционирования, сканирующей пространство вокруг пылесоса на несколько метров, датчики ориентирования способны выявить препятствие в пределах одного метра. Как правило, для выявления преград используют датчики двух типов: ультразвуковые и инфракрасные.

Принцип их действия схож. В обеих конструкциях имеются передатчик и приемник сигнала. В качестве самого сигнала используют либо звуковые волны, неслышимые человеческому уху (частотой свыше 20 кГц), или световые лучи инфракрасного диапазона.
При обнаружении препятствий, управляющая программа вносит корректировку в траекторию движения робота-пылесоса и уводит его в сторону.

Ведущую роль в системе играет ультразвуковой датчик. Он располагается в передней части устройства.
Инфракрасные сенсоры располагают на боковых поверхностях робота по его периметру. Они дополняют основной датчик, обеспечивая пылесосу возможность кругового отслеживания препятствий.

Боковые датчики выполняют еще одну функцию. Они обеспечивают движение робота вдоль стены, когда нужно убрать по периметру помещения. Как правило, сенсоры позволяют выдерживать интервал от стены на уровне 10-15 мм. Этого вполне достаточно для уборки мусора подвижными щетками робота-пылесоса.
В случае, когда препятствие не попало в зону действия ни одного из перечисленных датчиков и столкновение с поверхностью все же произошло, в работу вступает третья группа датчиков, установленная в подвижном бампере робота-пылесоса, — датчики касания. При срабатывании они посылают сигнал в центральный процессор, а тот в свою очередь оперативно корректирует траекторию движения робота. Датчики касания выполнены либо в виде обычных концевых выключателей, либо в формате оптопары, в которой световой луч прерывается подвижным «флажком» в момент нажатия на передний бампер.

Система безопасности
Система безопасности предназначена для защиты робота-пылесоса от падений и неправильного его использования со стороны пользователя.
Защиту от падения с высоты обеспечивает группа датчиков, установленная в нижней части по периметру устройства.

Это уже привычные инфракрасные сенсоры, с тем же принципом действия, но вот логика их работы существенно отличается. Датчик постоянно отслеживает наличие твердой поверхности под колесами робота-пылесоса. Как только она пропадает (робот подъехал к краю ступени или пытается съехать с высокого порожка), центральный процессор получает тревожный сигнал с датчика и изменяет траекторию движения робота-уборщика.

Сочетание светлых и темных цветовых схем напольного покрытия может вызвать ложные срабатывания оптических датчиков высоты, вследствие чего робот просто откажется проводить уборку темных зон.
В мотор-редукторах, приводящих в движение колеса пылесоса, установлены датчики опрокидывания робота. Если одно или оба колеса окажутся вывешенными, срабатывание датчиков приведет к остановке моторов. Это убережет аккумуляторную батарею от разрядки. Возобновление работы возможно только после установки робота-пылесоса на ровную поверхность.
Датчик опрокидывания — обычный концевой выключатель, разрывающий цепь питания при опрокидывании пылесоса или вывешивании одного из колес.

Чтобы не допустить использование робота-пылесоса без контейнера для сбора мусора, в приемный лоток устанавливают датчик наличия контейнера. Вариаций исполнения не так уж и много. Самый простой — установка концевого выключателя, более продвинутый — датчик в виде геркона. На корпусе контейнера устанавливают постоянный магнит, активирующий геркон, когда контейнер установлен на свое место. Процессор «видит» замкнутую цепь и «понимает» что устройство можно использовать.
Система парковки на базовую станцию
Возвращение на базовую станцию после уборки или в случае необходимости пополнения заряда аккумулятора, — еще одна интересная функция, реализованная в роботе-пылесосе. При выполнении процедуры возвращения на базовую станцию, задействованы две системы. На первом этапе — система позиционирования, которая отвечает за текущее положение устройства по отношению к базовой станции. Алгоритм определяет кратчайший оптимальный маршрут. Когда робот-пылесос находится в зоне видимости базовой станции, в работу включаются датчики парковки.
Система работает следующим образом. В базовой станции расположен мощный инфракрасный светодиод, выполняющий функцию маяка. В корпусе робота-пылесоса имеется пара оптических приемников, захватывающих луч маяка. Каждый из приемников передает процессору свое значение расстояния до маяка, а тот корректирует маршрут движения таким образом, чтобы оба значения сигналов сравнялись по величине. Как только это происходит, считается, что робот занял позицию прямо перед базой, после чего происходит его парковка на контактных площадках базовой станции.
Как видно, датчики робота-пылесоса превращают его в полностью автономное устройство, способное самостоятельно навести порядок в доме. Получается как в той известной песне Сережи Сыроежкина: «Вкалывают роботы, счастлив человек!». Единственное, за чем необходимо следить, чтобы девайс всегда находился в строю, так это за чистотой самих датчиков.