Плоское движение твердого тела
Плоским (плоскопараллельным) назыв. такое движение, при котором все его точки перемещаются параллельно некоторой неподвижной плоскости. Уравнения плоского движения: xA= f1(t), yA= f2(t), j = f3(t), точка А назыв. полюсом. Плоское движение тв.тела слагается из поступательного движения, при котором все точки тела движутся так же, как полюс (А),и из вращательного движения вокруг этого полюса. Поступательное перемещение зависит от выбора полюса, а величина и направление угла поворота не зависят.
Плоским движением твердого тела называется такое его движение, при котором каждая его точка все время движется в одной и той же плоскости.
Плоскости, в которых движутся отдельные точки тела, параллельны между собой и параллельны одной и той же неподвижной плоскости. Плоское движение твердого тела часто называют плоскопараллельным. Траектории точек тела при плоском движении являются плоскими кривыми.
Плоское движение твердого тела имеет большое значение в технике. Вращательное движение твердого тела вокруг неподвижной оси является частным случаем движения твердого тела.
При изучении плоского движения, как и любого другого, необходимо рассмотреть способы задания этого движения, а также приемы вычисления скоростей и ускорений точек тела.
 Если в теле провести некоторую прямую О1О2, перпендикулярную плоскостям, в которых происходит движение точек, то все точки этой прямой будут двигаться по одинаковым траекториям с одинаковыми скоростями и ускорениями; сама прямая будет, естественно, сохранять свою ориентацию в пространстве. Таким образом, при плоском, движении твердого тела достаточно рассмотреть движение одного из сечений тела.
Если в теле провести некоторую прямую О1О2, перпендикулярную плоскостям, в которых происходит движение точек, то все точки этой прямой будут двигаться по одинаковым траекториям с одинаковыми скоростями и ускорениями; сама прямая будет, естественно, сохранять свою ориентацию в пространстве. Таким образом, при плоском, движении твердого тела достаточно рассмотреть движение одного из сечений тела.
Сечение твердого тела будем называть плоской фигурой. Положение фигуры на ее плоскости полностью определяется положением отрезка прямой линии, жестко скрепленной с этой плоской фигурой.
Уравнения плоского движения твердого тела
Для задания положения плоской фигуры на плоскости относительно системы координат  , лежащей в плоскости фигуры, достаточно задать на этой плоскости положение отрезка АВ, скрепленного с фигурой.
, лежащей в плоскости фигуры, достаточно задать на этой плоскости положение отрезка АВ, скрепленного с фигурой.
Положение отрезка АВ, относительно системы координат определяется заданием координат какой-нибудь точки этого отрезка и его направления. Например, координаты точки А (  ) и направление, заданное углом
) и направление, заданное углом  .
.
Уравнения движения плоской фигуры относительно системы координат имеют вид:  .
.
 Твердое тело при плоском движении имеет три степени свободы.
Твердое тело при плоском движении имеет три степени свободы.
называются уравнениями плоского движения твердого тела.
 |
Перейдем к изучению движения отдельной точки твердого тела. Положение любой точки М плоской фигуры относительно подвижной системы отсчета  ,скрепленной с этой движущейся фигурой и лежащей в ее плоскости, полностью определяется заданием координат x и y точки М (Рис.6-3).
,скрепленной с этой движущейся фигурой и лежащей в ее плоскости, полностью определяется заданием координат x и y точки М (Рис.6-3).
Между координатами точки М в различных системах отсчета существует связь:
 , (6-1)
, (6-1)
где  — длина отрезка ОМ,
— длина отрезка ОМ,  — постоянный угол между ОМ и осью
— постоянный угол между ОМ и осью  . С учетом выражений
. С учетом выражений  и
и  получаем
получаем
 , (6-2)
, (6-2)
Формулы (6-2) являются уравнениями движения точки М плоской фигуры относительно координат . Эти формулы позволяют определить координаты любой точки плоской фигуры по заданным уравнениям движения этой фигуры и координатам этой точки относительно подвижной системы отсчета, скрепленной с движущейся фигурой.
Используя матрично-векторные обозначения уравнения (6-2) можно записать в такой форме:
 , (6-3)
, (6-3)
где А – матрица поворота на плоскости:
 ,
,  ,
,  ,
,  .
.
Разложение плоского движения на поступательное
И вращательное движения.
Теорема. Любое движение твердого тела, в том числе и движение плоской фигуры в ее плоскости, бесчисленным множеством способов можно разложить на два движения, одно из которых переносное, а другое – относительное.
 В частности, движение плоской фигуры в ее плоскости относительно системы , расположенной в той же плоскости, можно разложить на переносное и относительное движения следующим образом. Примем за переносное движение фигуры ее движение вместе с поступательно движущейся системой координат
В частности, движение плоской фигуры в ее плоскости относительно системы , расположенной в той же плоскости, можно разложить на переносное и относительное движения следующим образом. Примем за переносное движение фигуры ее движение вместе с поступательно движущейся системой координат  , начало которой скреплено с точкой О фигуры, принятой за полюс. Тогда относительное движение фигуры будет по отношению к подвижной системе координат вращением вокруг подвижной оси, перпендикулярной плоской фигуре и проходящей через выбранный полюс.
, начало которой скреплено с точкой О фигуры, принятой за полюс. Тогда относительное движение фигуры будет по отношению к подвижной системе координат вращением вокруг подвижной оси, перпендикулярной плоской фигуре и проходящей через выбранный полюс.
Для доказательства этого достаточно показать, что плоскую фигуру в ее плоскости из одного положения в любое другое можно перевести двумя перемещениями – поступательным перемещением в плоскости фигуры вместе с каким –либо полюсом и поворотом в той же плоскости вокруг этого полюса.
Рассмотрим два любых положения плоской фигуры 1 и 2. Выделим отрезок АB в рассматриваемой фигуре. Перевод фигуры из положения 1 в положение 2 можно рассматривать как суперпозицию двух движений: поступательного из 1 в 1′ и вращательного из 1′ в 2 вокруг точки A’, называемой обычно полюсом (рис. 6-4а). Существенно, что в качестве полюса можно выбрать любую точку, принадлежащую фигуре или даже лежащую в плоскости вне фигуры. На рис. 6-4б, к примеру, в качестве полюса выбрана точка В. Обратите внимание: длина пути при поступательном перемещении изменилась (в данном случае увеличилась), но угол поворота остался прежним!
Теоретическая механика
24. Плоскопараллельное (плоское) движение твердого тела.
Движение абсолютно твердого тела, при котором все его точки движутся в плоскостях, параллельных некоторой заданной неподвижной плоскости, называется плоскопараллельным. Другими словами, прямая, лежащая в плоскости сечения, в процессе движения тела не покидает этой плоскости.
Таким образом, плоское движение твердого тела полностью определяется движением плоской фигуры, образованной в результате сечения тела плоскостью. В дальнейшем, под плоским движением твердого тела будем понимать движение плоской фигуры в заданной плоскости.
Соотношение между скоростями точек плоской фигуры

В итоге можно утверждать, что плоское движение может быть рассмотрено как сумма двух движений: поступательное движение со скоростью  и вращательное движение вокруг оси перпендикулярной плоскости движения.
и вращательное движение вокруг оси перпендикулярной плоскости движения.
Теперь докажем важную теорему, связывающую модули скоростей двух, произвольно выбранных точек плоской фигуры.
Теорема. Проекции скоростей двух точек плоской фигуры на прямую, соединяющую эти точки, равны.



Из равенства левых частей уравнений следует равенство их правых частей, то есть
Метод разложения сложного движения на поступательное и вращательное

Метод разложения сложного движения на поступательное и вращательное
Плоскопараллельное движение раскладывают на два движения: поступательное вместе с некоторым полюсом и вращательное относительно этого полюса.
Разложение используют для определения скорости любой точки тела, применяя теорему о сложении скоростей (рис. 12.2).
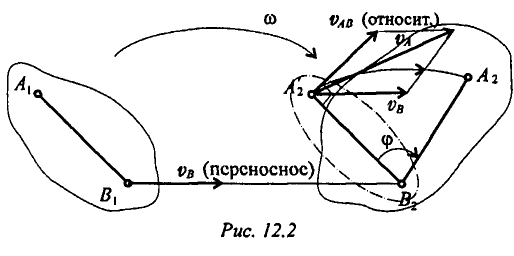
Точка  движется вместе с точкой
движется вместе с точкой  , а затем поворачивается вокруг с угловой скоростью и, тогда абсолютная скорость точки будет равна
, а затем поворачивается вокруг с угловой скоростью и, тогда абсолютная скорость точки будет равна

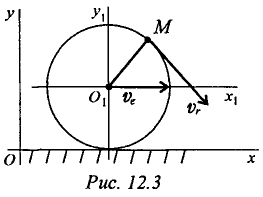
Примером плоскопараллельного движения может быть движение колеса на прямолинейном участке дороги (рис. 12.3).
Скорость точки 
 — скорость центра колеса переносная
— скорость центра колеса переносная
 — скорость вокруг центра относительная.
— скорость вокруг центра относительная.
 — неподвижная система координат
— неподвижная система координат
 — подвижная система координат, связанная с осью колеса.
— подвижная система координат, связанная с осью колеса.
Эта теория взята со страницы решения задач по предмету «техническая механика»:
Возможно эти страницы вам будут полезны:
Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
3. Плоское движение твердого тела
1. Разложение плоского движения твердого тела на поступательное и вращательное. Уравнения плоского движения твердого тела
Плоским (плоскопараллельным) движением твердого тела называется такое движение тела, при котором все его точки движутся в плоскостях параллельных некоторой неподвижной плоскости.
Плоское движение твердого тела можно разложить на поступательное движение тела вместе с некоторой точкой тела (полюсом) и вращение вокруг оси, проходящей через полюс перпендикулярно плоскости движения.
Число степеней свободы при плоском движении равно трем. Выберем точку А тела – полюс. Две координаты зададут перемещение полюса, а третья – угол поворота – вращение вокруг полюса:
 ,
, ,
, .
.
Последние выражения называются уравнениями плоского движения твердого тела.
3.2. Скорости точек тела при плоском движении.
Мгновенный центр скоростей
Рассмотрим точки АиВтвердого тела, совершающего плоское движение. Радиус вектор точкиВ ,
, , так как это расстояние между двумя точками в твердом теле. Продифференцируем обе части этого равенства:
, так как это расстояние между двумя точками в твердом теле. Продифференцируем обе части этого равенства: или
или . Для
. Для применим формулу производной от вектора, имеющего постоянный модуль:
применим формулу производной от вектора, имеющего постоянный модуль:
 – скорость точкиВпри вращении тела вокруг полюсаА. Тогда,
– скорость точкиВпри вращении тела вокруг полюсаА. Тогда, или
или , где
, где – вектор угловой скорости тела, он направлен по оси, проходящей через точкуАперпендикулярно к плоскости движения. Модуль
– вектор угловой скорости тела, он направлен по оси, проходящей через точкуАперпендикулярно к плоскости движения. Модуль – так какАВлежит в плоскости, а
– так какАВлежит в плоскости, а перпендикулярна плоскости.
перпендикулярна плоскости.
Мгновенным центром скоростей тела при плоском движении называется точка тела или подвижной плоскости, жестко связанной с телом, скорость которой в данный момент времени равна нулю.
Покажем, что если в данный момент времени угловая скорость тела  , то мгновенный центр скоростей существует. Рассмотрим плоскую фигуру, движущуюся в плоскости чертежа,
, то мгновенный центр скоростей существует. Рассмотрим плоскую фигуру, движущуюся в плоскости чертежа, , скорость точкиА–
, скорость точкиА– . Проведем перпендикуляр вАк скорости
. Проведем перпендикуляр вАк скорости и отложим на нем отрезок
и отложим на нем отрезок . Покажем, чтоР– мгновенный центр скоростей, т.е.
. Покажем, чтоР– мгновенный центр скоростей, т.е. .
.
Скорость точки Р ,
, , т.е.
, т.е. , следовательно
, следовательно , а значитР– мгновенный центр скоростей.
, а значитР– мгновенный центр скоростей.
Пусть теперь тело совершает плоское движение и известно положение мгновенного центра скоростей Р. Определим вначале скорость точкиА: ,
, ; скорость точкиВ:
; скорость точкиВ: ; тогда
; тогда . Следовательно скорости точек тела при плоском движении относятся как их расстояния до мгновенного центра скоростей.
. Следовательно скорости точек тела при плоском движении относятся как их расстояния до мгновенного центра скоростей.
Рассмотрим способы нахождения мгновенного центра скоростей.
3.3. Ускорение точек тела при плоском движении.
Мгновенный центр ускорений
Рассмотрим точки АиВтвердого тела, совершающего плоское движение. Скорость точкиВ . Продифференцируем обе части этого равенства:
. Продифференцируем обе части этого равенства: . Обозначим
. Обозначим ,
, ,
, – угловое ускорение,
– угловое ускорение, – скорость точкиВотносительно полюсаА,
– скорость точкиВотносительно полюсаА, . Введем обозначения:
. Введем обозначения: – касательное (вращательное) ускорение точкиВ, при вращении тела вокруг полюсаА,
– касательное (вращательное) ускорение точкиВ, при вращении тела вокруг полюсаА, – вектор углового ускорения, направленный перпендикулярно к плоскости движения;
– вектор углового ускорения, направленный перпендикулярно к плоскости движения; – нормальное ускорение точкиBпри вращении тела вокруг полюсаА. С учетом этих обозначений выражение для ускорения записывается следующим образом:
– нормальное ускорение точкиBпри вращении тела вокруг полюсаА. С учетом этих обозначений выражение для ускорения записывается следующим образом: . Таким образом, ускорение любой точки тела при плоском движении равно геометрической сумме ускорения какой-либо другой точки тела (полюса) и ускорения точки тела при его вращении вокруг полюса. Если обозначить
. Таким образом, ускорение любой точки тела при плоском движении равно геометрической сумме ускорения какой-либо другой точки тела (полюса) и ускорения точки тела при его вращении вокруг полюса. Если обозначить , то
, то ,
, ,
, ,
, .
.
Мгновенным центром ускорений тела при плоском движении называется точка тела или подвижной плоскости, жестко связанной с телом, ускорение которой в данный момент времени равна нулю.
Покажем, что если в данный момент времени  и
и , то мгновенный центр ускорений существует. Рассмотрим плоскую фигуру, движущуюся в плоскости чертежа,
, то мгновенный центр ускорений существует. Рассмотрим плоскую фигуру, движущуюся в плоскости чертежа, ,
, ускорение точкиА–
ускорение точкиА– . Проведем в точкеАлуч под углом
. Проведем в точкеАлуч под углом к ускорению
к ускорению и отложим на нем отрезок
и отложим на нем отрезок . Покажем, чтоQ– мгновенный центр ускорений, т.е.
. Покажем, чтоQ– мгновенный центр ускорений, т.е. .
.
Ускорение точки Q ,
,
 ,
, ,
, ,
, , следовательно
, следовательно , а значитQ– мгновенный центр ускорений. Тогда
, а значитQ– мгновенный центр ускорений. Тогда ,
, ,
, .
.
Рассмотрим способы определения углового ускорения тела при плоском движении.
1. Если известен угол поворота  , то
, то .
.
2. Проецируя векторное уравнение  на ось, перпендикулярную ускорению точкиВ(при известных
на ось, перпендикулярную ускорению точкиВ(при известных , направлении и величине
, направлении и величине , направлении вектора
, направлении вектора ), получаем уравнение из которого определяем
), получаем уравнение из которого определяем и тогда
и тогда .
.