Ох эти три буквы… Спокойно, всё пристойно, я про CAN.

CAN шина, что же это такое? Много информации читал, но нихрена не понимал. А тут вот нашлось простое и доходчивое объяснение, которое поймёт и ребёнок. А может и не поймет…
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.
Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN
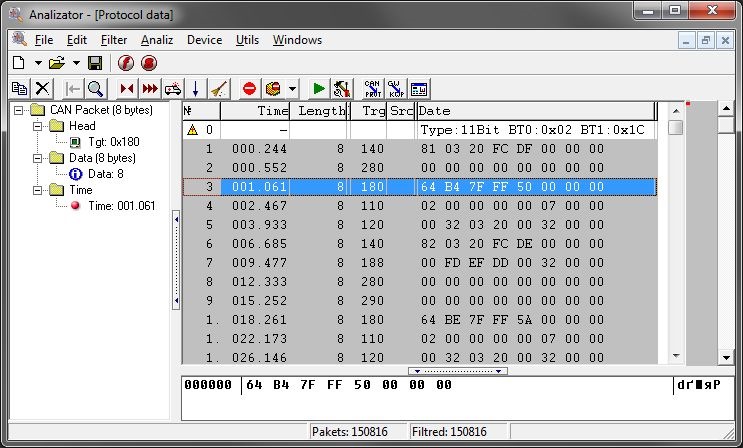
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
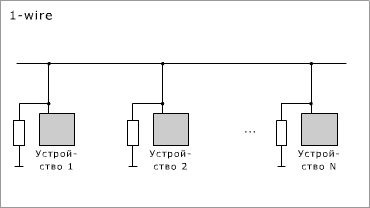
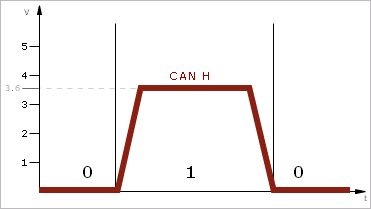
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN
Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Немного отступлю от первоисточника.
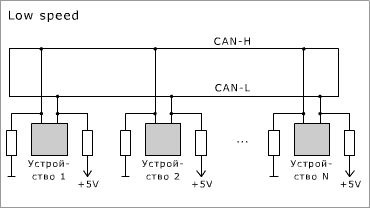
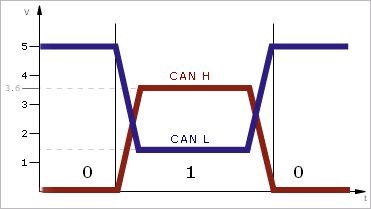
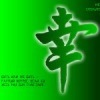
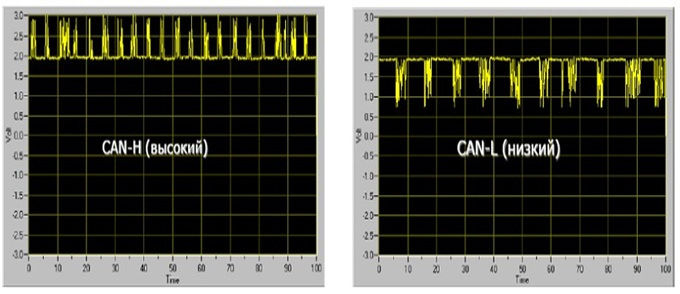
Самый главный плюс, это очень высокая помехозащищённость сигнала. В чём прикол? Одновременно идут два дублирующих сигнала, только один высокий, второй низкий. Ловят они помеху. Помеха воздействует одинаково на оба сигнала. А на выходе у нас одинаковый уровень. Два уровня сигнала компенсируют помеху. Наглядно это выглядит вот так:
Вот такие пироги. Наткнулся тут : quantexlab
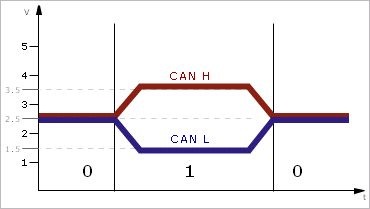
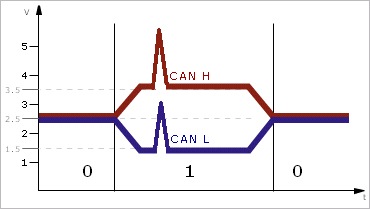
Напряжение линий CAN High и CAN Low
Максимальные напряжения шины CAN
Максимальные напряжения — это самое высокое среднее напряжение с последней холодной загрузки.
Примечание. Холодная загрузка выполняется после того, как дисплей выключен в течение 24 часов или после отсоединения некоммутируемого питания от дисплея.
Максимальное напряжение линий CAN High и CAN Low обычно должны находиться в пределах от 1,7 до 3,3 В. Измерение напряжения усредняется каждую секунду.
Поскольку мультиметры обычно показывают среднее напряжение, не сравнивайте показания мультиметра с этими значениями.
Измерение напряжения с помощью мультиметра
Напряжение линии CAN High
Это значение обычно должно находиться в пределах от 2,5 до 3,5 В. При измерении на работающей машине оно обычно находится в диапазоне от 2,7 до 3,3 В.
Напряжение линии CAN Low
Это значение обычно должно находиться в пределах от 1,5 до 2,5 В. При измерении на работающей машине оно обычно находится в диапазоне от 1,7 до 2,3 В.
Поиск и устранение неисправностей
Если напряжения выходят за пределы указанных диапазонов, измерьте сопротивление между линиями CAN High и CAN Low с помощью мультиметра.
Оба согласующих резистора работают должным образом.
Один согласующий резистор на шине CAN не работает должным образом.
Оба согласующих резистора на шине CAN не работают должным образом.
Вследствие быстрого изменения напряжения мультиметр не будет показывать ни постоянного, ни точного напряжения на линиях CAN High и CAN Low. Чтобы увидеть точные изменения в шине CAN, необходимо использовать осциллограф.
Digitrode
цифровая электроника вычислительная техника встраиваемые системы
Что такое шина CAN и как она работает
Что такое интерфейс CAN и зачем он нужен
Controller Area Network (CAN) – это последовательная коммуникационная шина, разработанная для надежной и гибкой работы в жестких условиях, особенно для промышленных и автомобильных приложений.

Первоначально изобретенный Bosch, а затем кодифицированный в стандарт ISO11898-1, интерфейс CAN определяет канал передачи данных и физический уровень модели взаимодействия открытых систем (OSI), обеспечивая низкоуровневое сетевое решение для высокоскоростной связи в автомобилях и промышленном оборудовании. В частности, CAN был разработан для уменьшения кабельной проводки в автомобилях, чтобы отдельные электронные блоки управления (ЭБУ) внутри транспортного средства могли обмениваться данными только по одной паре проводов. На следующем рисунке показаны ЭБУ автомобиля, подключенного к шине CAN.

Бортовая диагностика (OBD) – это система диагностики и отчетности автомобиля, которая позволяет устранять неполадки с помощью диагностических кодов неисправности (DTC). Когда загорается индикатор «проверьте двигатель» (check engine), техник часто использует портативное устройство для считывания кодов двигателя с автомобиля. На самом низком уровне эти данные передаются по протоколу, который в большинстве случаев является CAN.
DeviceNet – это сетевой протокол высокого уровня, используемый в промышленных приложениях. Это значительно уменьшает проводку, необходимую между системой управления и устройствами ввода/вывода. Вместо того, чтобы подключать каждое устройство к отдельному входу/выходу на модулях ввода/вывода ПЛК, устройства могут быть связаны друг с другом через четырехпроводный разъем и подключены к сетевому сканеру на ПЛК. На самом низком уровне мы находим, что CAN работает в рамках протокола DeviceNet. На следующем рисунке показан ПЛК, сканирующий сеть промышленных устройств, обменивающихся данными через DeviceNet.

Кадры сообщений CAN
Так как же на самом деле выглядит сообщение CAN? В первоначальном стандарте ISO изложено то, что называется стандартом CAN. Стандарт CAN использует 11-битный идентификатор для разных сообщений, что в сумме составляет 211, т. е. 2048, разных идентификаторов сообщений. CAN был позже изменен; идентификатор был расширен до 29 бит, что дало 229 идентификаторов. Это называется расширенной шиной CAN. CAN использует мультимастерную шину, где все сообщения транслируются по всей сети. Идентификаторы обеспечивают приоритет сообщения для арбитража.
CAN использует дифференциальный сигнал с двумя логическими состояниями, называемыми рецессивным и доминантным. Рецессивный указывает, что дифференциальное напряжение меньше минимального порогового напряжения. Доминантный указывает, что дифференциальное напряжение больше, чем этот минимальный порог. Интересно, что доминантное состояние достигается путем передачи логического уровня «0» на шину, в то время как рецессивное состояние достигается с помощью логического уровня «1». Это инверсия от традиционных высоких и низких логических значений, используемых в большинстве систем. Эти два состояния будут подробно описаны далее. Важно то, что доминантное состояние приоритетнее рецессивного в арбитраже.
Стандартный кадр CAN
Стандартный кадр сообщения CAN состоит из нескольких битовых полей. Они показаны на следующем рисунке.

Первый бит – это начало кадра (SOF). Этот доминирующий бит представляет начало сообщения CAN. Далее идет 11-битный идентификатор, который устанавливает приоритет сообщения CAN. Чем меньше идентификатор, тем выше приоритет сообщения.
Бит запроса удаленной передачи (RTR) обычно является доминантным, но он становится рецессивным, когда один узел запрашивает данные у другого. Бит расширения идентификатора (IDE) является доминантным, когда отправляется стандартный кадр CAN, а не расширенный. Бит r0 зарезервирован и в настоящее время не используется. Кусок кода длины данных (DLC) показывает, сколько байтов данных содержится в этом сообщении.
Далее идут сами данные, представляющие собой столько байтов, сколько представлено в битах DLC. Циклическая проверка избыточности (CRC) – это 16-битная контрольная сумма для обнаружения ошибок в передаваемых данных. Если сообщение принято правильно, принимающий узел перезаписывает рецессивный бит подтверждения (ACK) доминантным битом. ACK также содержит бит-разделитель для синхронизации. Конец кадра (EOF) означает конец сообщения CAN и имеет ширину 7 бит для обнаружения ошибок вставки битов. Последняя часть сообщения CAN – это межкадровое пространство (IFS), используемое в качестве временной задержки. Эта временная задержка точно соответствует времени, необходимому контроллеру CAN для перемещения полученного сообщения в буфер для дальнейшей обработки.
Расширенный кадр CAN
Расширенный кадр сообщения CAN использует 29-битный идентификатор вместе с несколькими дополнительными битами.

Расширенное сообщение имеет заменяющий бит удаленного запроса (SRR) после 11-битного идентификатора, который действует как заполнитель для сохранения той же структуры, что и стандартный CAN. На этот раз расширение идентификатора (IDE) должно быть рецессивным, что указывает на то, что за ним следует расширенный идентификатор. Бит RTR находится после 18-битного идентификатора, за ним следует второй резервный бит r1. Остальная часть сообщения остается прежней.
Типы сообщений CAN
Теперь, когда вы знаете, как выглядит сообщение CAN, вам может быть интересно, какие сообщения передаются по шине. CAN допускает четыре разных типа сообщений. Это кадр данных, удаленный кадр, кадр перегрузки и кадр ошибок.
Стандартный кадр данных CAN использует идентификатор, данные и код длины данных, проверку циклическим избыточным кодом и биты подтверждения. Оба бита RTR и IDE являются доминирующими в кадрах данных. Если рецессивный бит подтверждения на принимающей стороне перезаписан доминантным битом, и передатчик, и приемник распознают это как успешную передачу.
Удаленный кадр CAN выглядит аналогично кадру данных, за исключением того факта, что он не содержит никаких данных. Он отправляется с битом RTR в рецессивном состоянии; это указывает на то, что это удаленный кадр. Удаленные кадры используются для запроса данных от узла.
Когда узел обнаруживает ошибку в сообщении на шине CAN, он передает кадр ошибки. Это приводит к тому, что все другие узлы отправляют кадр ошибки. После этого узел, где произошла ошибка, повторно передает сообщение. Кадр перегрузки работает аналогично, но используется, когда узел получает кадры быстрее, чем он может их обработать. Этот кадр обеспечивает временной буфер, чтобы узел мог догнать.
Арбитраж и сигналы на шине CAN
CAN – это протокол CSMA/CD, означающий, что каждый узел на шине может обнаруживать коллизии и откатываться на определенное время перед попыткой повторной передачи. Это обнаружение коллизий достигается посредством арбитража приоритетов на основе идентификаторов сообщений. Прежде чем обсудить арбитраж, давайте подробнее рассмотрим доминантные и рецессивные биты, используемые на шине CAN.
Интересным аспектом шины CAN является то, что она использует инвертированную форму логики с двумя состояниями: доминантным и рецессивным. На рисунке ниже показана упрощенная версия вывода и ввода CAN-трансивера. Поток битов ‘101’ поступает с / идет на CAN-контроллер и / или микроконтроллер. Обратите внимание, что когда контроллер отправляет поток битов, они дополняются и помещаются в линию CANH. Линия CANL всегда является дополнением CANH. Чтобы арбитраж работал, устройство CAN должно отслеживать как то, что оно отправляет, так и то, что в данный момент находится на шине, то есть то, что оно получает.


Как упоминалось ранее, чем меньше 11-битный идентификатор, тем выше приоритет сообщения. Каждый бит, который передает узел, он контролирует. Таким образом, узел обнаруживает, что сообщение с более высоким приоритетом размещается на шине. В тот момент, когда узел отправляет рецессивный бит, но обнаруживает доминантный бит на шине, он «отступает». Это называется неразрушающим арбитражем, потому что «победившее» сообщение продолжает передаваться без каких-либо проблем. Обратите внимание, что рецессивная логика «1» проигрывает доминантной логике «0». Это имеет смысл, поскольку более низкое значение идентификатора представляет более высокий приоритет. Чтобы лучше понять, что это значит, взгляните на следующий рисунок, на котором показаны три узла на шине CAN, пытающиеся получить контроль. Важно помнить, что каждый раз, когда отображается рецессивный бит, контроллер отправляет «1», в то время как доминантные биты соответствуют отправке «0».
Узлы 1–3 все посылают поток битов. Этот поток битов представляет идентификаторы сообщений и их приоритет. Для начала все три узла отправляют «1», который представлен на шине CAN как рецессивный бит. Затем каждый узел отправляет «0» или доминанатный бит. Третий бит, помещенный в шину – это еще один бит «1» или рецессивный бит. На этом этапе ни один из узлов не обнаружил никакого конфликта с другим узлом на шине, поэтому они продолжают передавать.

Для четвертого бита узел 1 отправляет «0» или доминантный бит. Узел 2 передает рецессивный бит, но обнаруживает доминантный бит на шине. Он немедленно «отступает», зная, что в данный момент отправляется сообщение с более высоким приоритетом. Узел 3 продолжает передачу, поскольку он считывает тот же доминантный бит, который он передал. Когда пятый бит помещается в шину, узел 3 затем распознает, что он имеет более низкий приоритет, и прекращает передачу. И узел 2, и узел 3 ждут определенное количество времени, прежде чем пытаться снова. Это показано в правой части рисунка, где выиграл арбитраж узел 3. Как видите, логический бит «0», соответствующий младшему идентификатору сообщения, позволяет проводить арбитраж.
Заключение
В этой статье были представлены основные принципы работы шины CAN. CAN – это надежная шина последовательной связи, используемая в основном в автомобильной и промышленной среде. CAN использует дифференциальный сигнал, что делает ее более устойчивой к шуму, а также схему арбитража приоритетов для неразрушающей передачи сообщений. CAN отлично подходит для встраиваемых приложений, которые работают в опасных средах или областях с большим количеством электромагнитных помех.
CAN-технология BOSCH в диагностике автомобилей
CAN Технологии
Применяемая на автомобилях система CAN (Controller_Area_Network) позволяет установить связь между отдельными электронными блоками управления. При эксплуатации автомобиля и при диагностике его агрегатов эта система предоставляет возможность использования новых функций, которые не могут быть возложены на отдельно действующие блоки управления.
Применяемая на автомобилях система CAN позволяет объединить в локальную сеть электронные блоки управления или сложные датчики, как, например, датчик угла поворота рулевого колеса. Обозначение CAN является сокращением от выражения Controller:Area:Network (локальная сеть, связывающая блоки управления). Применение системы CAN на автомобиле дает следующие преимущества:
Обмен данными между блоками управления производится на унифицированной базе. Эту базу называют протоколом. Шина CAN служит как бы магистралью для передачи данных.
Независимо действующие системы, например, система курсовой стабилизации ESP, могут быть реализованы с меньшими затратами.
Упрощается подключение дополнительного оборудования.
Шина данных CAN является открытой системой, к которой могут быть подключены как медные провода, так и стекловолоконные проводники.
Диагностика электронных блоков управления производится посредством кабеля «К».
Диагностика некоторых компонентов оборудования салона автомобиля уже сегодня производится через шину CAN (например, это подушки безопасности и блоки управления в дверях автомобиля). В данном случае речь идет о так называемом виртуальном кабеле «К». В будущем необходимость в кабеле «К» должна отпасть.
Можно проводить одновременную диагностику нескольких блоков управления, входящих в систему.
CAN
Промышленная сеть CAN (Controller Area Network) была создана в конце 80-х годов фирмой Bosch как решение для распределенных систем, работающих в режиме реального времени. Первая реализация CAN применялась в автомобильной электронике, однако сейчас CAN находит применение практически в любых типах машин и промышленных установок, от простейших бытовых приборов до систем управления ускорителями элементарных частиц. В настоящий момент CAN-протокол стандартизован в международном стандарте ISO 11898.
Основные положения стандарта CAN.
В качестве среды передачи в CAN используется дифференциальная линия связи — витая пара, сигналы по которой передаются в дифференциальном режиме.
Для контроля доступа к среде передачи используется метод недеструктивного арбитража.
Данные передаются короткими (максимальная длина поля данных — 8 байт) пакетами, которые защищены контрольной суммой.
В CAN отсутствует явная адресация сообщений. Вместо этого каждый пакет снабжен полем арбитража (идентификатор+RTR-бит), которое задает приоритет сообщения в сети.
CAN имеет исчерпывающую схему контроля ошибок, которая гарантирует повторную передачу пакета, в случае возникновения ошибок передачи/приема сообщения.
В CAN существует способ автоматического устранения узла, являющегося источником ошибочных пакетов в сети.
CAN контроллеры.
Протокол CAN полностью реализован аппаратно — в виде микросхем- CAN контроллеров или в виде стандартного периферийного устройства в составе микросхемы- микроконтроллера. Все производители современных микроконтроллеров по крайней мере в одном из семейств имеют микроконтроллеры со встроенным периферийным одним или несколькими CAN-контроллерами. Таким образом, сегодня, СAN-контроллер является таким же стандартным периферийным устройством как контроллер SPI, I2C или UART.
Что такое CAN-шина
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Рецессивные и доминантные биты
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Как это исполнено физически
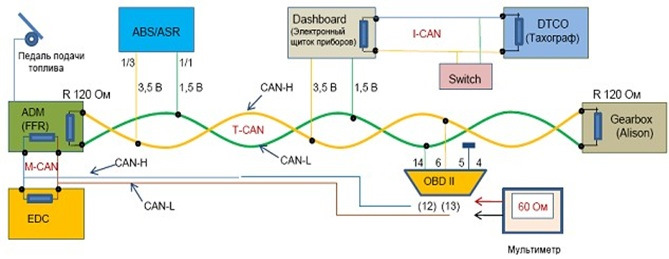
Физически CAN-шина – система из специального кабеля с разветвителями для подключения электронных блоков и конечных устройств-терминаторов (резисторов).
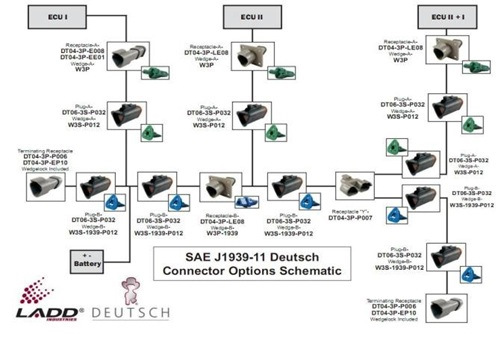
Витая пара
Чаще всего шина CAN – скрученные (витые) пары проводов (по 30 витков на один погонный метр) с разветвителями для подключения ЭБУ (ECU) и конечными резисторами-терминаторами с номинальным сопротивлением 120 Ом на концах шины.
Сколько CAN-шин может быть на ТС
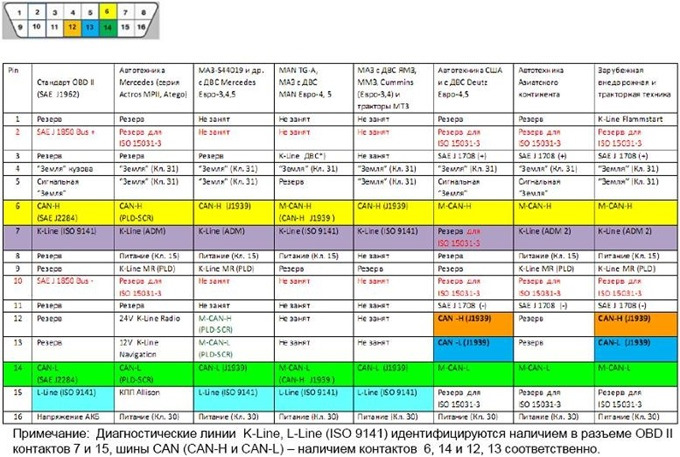
На ТС экологического уровня Евро-3 и выше может быть от 1 до 6 и более шин CAN, которые могут обозначаться как M-CAN, T-CAN, I-CAN, H-CAN, A-CAN, EBS-CAN и т.д.
Как найти CAN-шину
Признаками шины М-CAN и Т-CAN могут быть, например:
• наличие диагностического разъема OBD II;
• цвет и сечение проводов витых пар;
• связь витых пар с контактами в разъемах OBD II и ЭБУ.
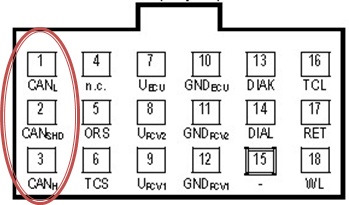

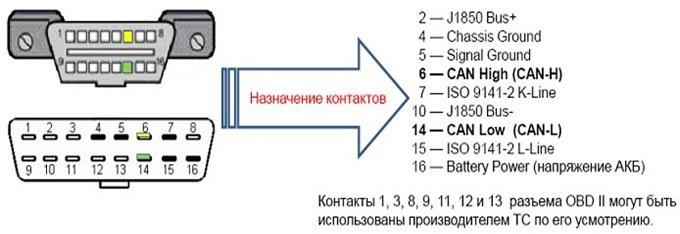
Диагностический разъём OBD II и его распиновка
На большинстве ТС после 2003 года используется диагностический разъем OBD II или DLC (Diagnostic Link Connector), который находится под панелью приборов.
Как будем искать CAN-шину
С помощью мультиметра можно проверить любую витую пару проводов, чтобы убедиться в следующем:
1. Является ли проверяемая витая пара вообще CAN-шиной? (Проверка импеданса);
2. Если витая пара является CAN-шиной, то передаются ли в ней какие–либо сообщения? Проверка работоспособности);
3. Находится ли CAN-шина в работоспособном состоянии и какая из линий шины является CAN-L, а какая – CAN-H?
Внимание! Неосторожное обращение с включенной
CAN-шиной может привести к фиксации в ней ошибок!
Проверка импеданса
Проверка импеданса (полного сопротивления)
ВНИМАНИЕ!
Проверка должна производиться при полностью выключенном питании бортовой сети (выключенной массе).
Контрольное значение должно быть в пределах 60 Ом.
Проверка работоспособности CAN-шины
Находится ли CAN-шина в рабочем состоянии?
ВНИМАНИЕ! Проверка производится при включенном замке зажигания, работающем двигателе, нажатии и отпускании педали подачи топлива между проводами витой пары.
Контрольное значение напряжения должно быть в пределах 1,2-3,0 В.
Определение CAN-H и CAN-L
Какой из проводов является CAN-H, а какой CAN-L?
ВНИМАНИЕ! Проверка производится в состоянии рецессии (при включенном главном выключателе АКБ (кнопке массы), замок зажигания выключен!) и в доминантном состоянии (при включенном замке зажигания в положение «Приборы», при работающем и не работающем двигателе).
Проверка с помощью осциллографа
Учитывая возможные отклонения уровня напряжения от номинальных значений, состояние рецессии можно определить только с помощью осциллографа.
Цвет оболочки и цветовая маркировка проводов

CAN-шина. Что можно увидеть?
В зависимости от того, какую информацию заложил в CAN-шину производитель, могут распознавать:
Способы подключения:
Контактный способ:
Достоинства:
• просто и дешево;
• можно работать на считывание и передачу.
Недостатки:
• может оказывать мешающее влияние на CAN-шину; проблемы с возникновением и фиксацией ошибок;
• Проблемы с гарантией на ТС.
Безконтактный способ (CANCrocodile):

Достоинства:
• не оказывает мешающего воздействия на CAN-шину.
Недостатки:
• можно работать только на считывание.
Бесконтактныe считыватели Crocodile
CAN Crocodile – устройство для бесконтактного считывания данных с CAN-шины автомобиля. CAN Crocodile применяется для подключения к шине CAN систем GPS/ГЛОНАСС мониторинга, которые получают информацию о режимах работы двигателя, состоянии датчиков, уровне топлива, наличии неисправностей и т.д. CAN Crocodile не нарушает изоляцию проводов CAN и «слушает» обмен по шине с помощью специального беспроводного приемника. Применение CAN Crocodile абсолютно безопасно для автомобиля (!), незаметно для работы бортового компьютера, диагностического сканера и других электронных систем. Особенно актуально применение CAN Crocodile для гарантийных автомобилей, в которых подключение каких-либо электронных устройств к шине CAN часто служит поводом для снятия с гарантии.

Бесконтактным способом – без нарушения изоляционной оболочки проводов и электрического контакта.
Не нарушает изоляцию;
Не влияет на работу CAN-шины;
Не занимает диагностический разъём